
Spine rhythm#
The spine rhythm is a set of drivers which can be used to reduces the degrees of fredom of the spine and makes the spine model easier to use without the need to specify how every vertebra should move.
The spine rhythms consists of a set of coefficients which specifies how the spine should move as function of the overall spine motion. The spine rhythm coefficients are documented on this page which also show how to overwrite the default coefficients with your own data.
Spine rhytmn class templates#
The model repository comes with two class templates which makes it easy to
create kinematic rhytms between joints. The two class templates are
RhythmDriverLinear and
RhythmDriverBiLinear
which can be used to create
linear and rhythms with different coefficients for the positive and negative
direction.
Here is an example of simple linear rhythm between two joints:
RhythmDriverLinear Rhythm = {
RhythmCoefficients = {0.2, 0.8};
Measures.Input = {
AnyJoint& ref1 = Main.HumanModel.BodyModel.Interface.Arm.Right.ShoulderElevation;
AnyJoint& ref2 = Main.HumanModel.BodyModel.Interface.Arm.Right.GHElevation;
};
};
In the example the rhythm constrains two DOFs of the arm to move in a 1:4 ratio.
The use of RhythmDriverBiLinear is quite similar, and the use of both class
templates are documented here.
The class templates encapsulate the complex rhythm implementation which uses
classes AnyKinFunComb and AnyKinMeasureFunComb1 to combine and transform
kinematic measures into a single kinematic measure. It is easy to see the
underlying code by right-clicking the class template in the AnyScript editor and
selecting Go to definition.
In the model the spine rhythm is comprised of many different rhythms which are linked together with other rhythms. This is done so rhythms can be activated as needed depending on what data is available for driving model.
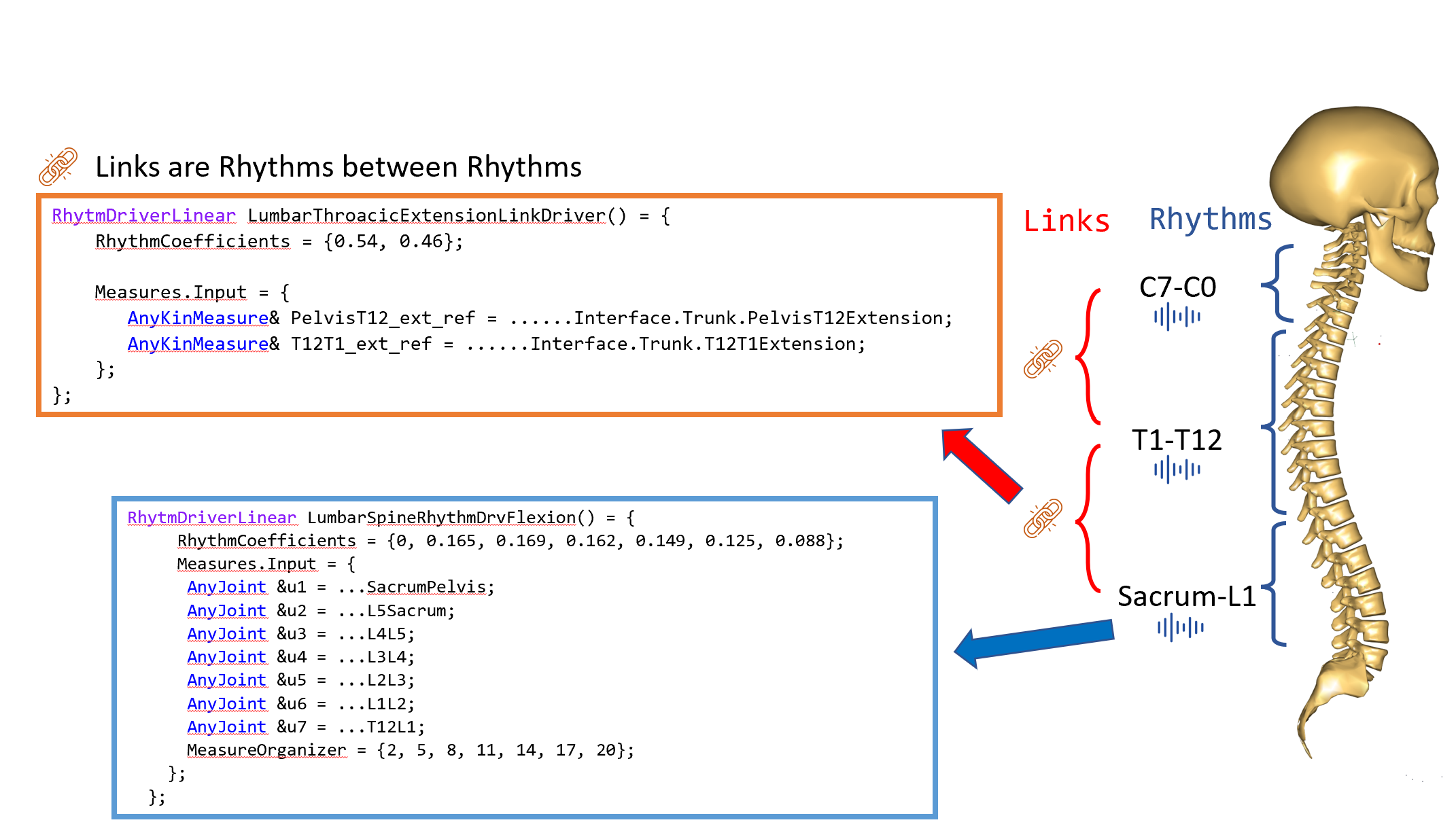
Fig. 17 The figure shows how the different rhythms are linked together. The SpineRhythmDrvFlexion is the main driver of the
flexion rhythm for the lumbar spine.#
Spine rhythm coefficients#
The rhythm coefficients were derived from a review of spine literature. The values for spine and vertebra range-of-motion vary significantly in published studies, and no single complete dataset was found. Consequently, the rhythm presented here is a composite set, designed to provide the most consistent and average set of rhythm coefficients. The two curves for the thoracic flexion rhythm is because this rhythm is defined as a bilinear rhythm with different coefficients for the positive and negative direction. The papers used to derive the coefficients are listed at the bottom of the page.

Fig. 18 Coefficients for different sub rhythms of the spine. The two curves for the thoracic flexion rhythm is because this rhythm is defined as a bilinear rhythm with different coefficients for the positive and negative direction.#

Fig. 19 Coefficients for linking sub rhythms together. This is essentially rhythms between the rhythms.#
Overwriting the spine rhythm coefficients#
The spine rhythm coefficients are defined in such a way that they can be directly overwritten by the user define a custom spine rhythm. The rhythm drivers exist in the following places in the model:
Main.HumanModel.BodyModel.Trunk.Joints.Cervical =
{
Flexion.rhythmC2C7 = { };
Flexion.rhythmC1C0SkullThoraxFlexion = { };
LateralBending.rhythmC2C7 = { };
Rotation.rhythmC2C7 = { };
Rotation.rhythmC2C1SkullThoraxRotation = { };
CervicalThroacicRotationLinkDriver = { };
CervicalThroacicLatBendingLinkDriver = { };
CervicalThroacicExtensionLinkDriver = { };
};
Main.HumanModel.BodyModel.Trunk.Joints.Thorax =
{
LateralBendingRhythmDriver = { };
AxialRotationRhythmDriver = { };
FlexionExtensionRhythmDriver = { };
LumbarThroacicExtensionLinkDriver = { };
LumbarThroacicLatBendingLinkDriver = { };
LumbarThroacicRotationLinkDriver = { };
};
Main.HumanModel.BodyModel.Trunk.Joints.Lumbar =
{
SpineRhythmDrvFlexion = {};
SpineRhythmDrvRotation = {};
SpineRhythmDrvLatBending = {};
};
Here is an example of how to overwrite the RhythmCoefficients in the
LateralBendingRhythmDriver of the thoracic spine:
Main.HumanModel.BodyModel.Trunk.JointsThorax =
{
LateralBendingRhythmDriver =
{
RhythmCoefficients = {0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.1};
};
};
In the example above, the RhythmCoefficients variable is redefined with a new
set of values. This will overwrite the default coefficients defined in the
JointsThorax.any file.
It is important to note that the number of coefficients in the
RhythmCoefficients vector must match the number of kinematic measures used in
the rhythm. In the case of the LateralBendingRhythmDriver, there are 11
kinematic measures, so the RhythmCoefficients vector must have 11 elements.
References#
The rhythm coefficients were derived from the following papers:
Thoracic Region#
Flexion/extension#
Narimani, M., & Arjmand, N. (2018). https://doi.org/10.1016/j.jbiomech.2018.01.017
Madinei, S. S., & Arjmand, N. (2018). https://doi.org/10.24200/sci.2018.20503
Ignasiak, D., Rüeger, A., & Ferguson, S. J. (2017). https://doi.org/10.1016/j.humov.2017.05.011
Alqhtani, R. S., Jones, M. D., Theobald, P. S., & Williams, J. M. (2015). https://doi.org/10.1016/j.jmpt.2014.12.007
Lateral-bending:#
Narimani, M., & Arjmand, N. (2018). https://doi.org/10.1016/j.jbiomech.2018.01.017
Alqhtani, R. S., Jones, M. D., Theobald, P. S., & Williams, J. M. (2015). https://doi.org/10.1016/j.jmpt.2014.12.007
Schinkel-Ivy, A., Pardisnia, S., & Drake, J. D. M. (2014). https://doi.org/10.1123/jab.2013-0247
Rotation:#
Fujimori, T., Iwasaki, M., Nagamoto, Y., Matsuo, Y., Ishii, T., Sugiura, T., Kashii, M., Murase, T., Sugamoto, K., & Yoshikawa, H. (2014). https://doi.org/10.1016/j.spinee.2013.11.054
Narimani, M., & Arjmand, N. (2018). https://doi.org/10.1016/j.jbiomech.2018.01.017
Alqhtani, R. S., Jones, M. D., Theobald, P. S., & Williams, J. M. (2015). https://doi.org/10.1016/j.jmpt.2014.12.007
Lumbar region:#
Flexion/extension:#
Eberhardt, K., Ganslandt, O., & Stadlbauer, A. (2014). https://doi.org/10.1007/s00234-014-1433-0
Dvorák, J., Panjabi, M. M., Chang, D. G., Theiler, R., & Grob, D. (1991). https://journals.lww.com/spinejournal/abstract/1991/05000/functional_radiographic_diagnosis_of_the_lumbar.14.aspx
Lateral bending:#
Dvorák, J., Panjabi, M. M., Chang, D. G., Theiler, R., & Grob, D. (1991). https://journals.lww.com/spinejournal/abstract/1991/05000/functional_radiographic_diagnosis_of_the_lumbar.14.aspx
Rozumalski, A., Schwartz, M. H., Wervey, R., Swanson, A., Dykes, D. C., & Novacheck, T. (2008). https://doi.org/10.1016/j.gaitpost.2008.05.005
Rotation:#
Fujii, R., Sakaura, H., Mukai, Y., Hosono, N., Ishii, T., Iwasaki, M., Yoshikawa, H., & Sugamoto, K. (2007). https://doi.org/10.1007/s00586-007-0373-3
Rozumalski, https://doi.org/10.1016/j.gaitpost.2008.05.005
Pearcy, M. J. (1985). https://doi.org/10.3109/17453678509154154
Neck:#
Flexion/extension - Lateral bending -rotation#
Anderst, W. J., Donaldson, W. F., 3rd, Lee, J. Y., & Kang, J. D. (2015). https://doi.org/10.1016/j.jbiomech.2015.02.049
Dvorak, J., Antinnes, J. A., Panjabi, M., Loustalot, D., & Bonomo, M. (1992). https://doi.org/10.1097/00007632-199210001-00009
Yu, Y., Li, J.-S., Guo, T., Lang, Z., Kang, J. D., Cheng, L., Li, G., & Cha, T. D. (2019). https://doi.org/10.1016/j.jot.2018.12.002
Zhou, C., Wang, H., Wang, C., Tsai, T.-Y., Yu, Y., Ostergaard, P., Li, G., & Cha, T. (2020). https://doi.org/10.1016/j.jbiomech.2019.109418