
Regensburg-Ulm Hand Model (RUHM)#
Unreleased model:
The model is under development and not yet included in the managed model repository. The model is used in various research projects and access to the development version can be given on request.
The Regensburg-Ulm hand model (RUHM) is a detailed hand model which includes all extrinsic and intrinsic muscles using data from an anatomical study by Havelková et al. [1] (Charles University, Pilsen) of 16 cadaveric forearms.

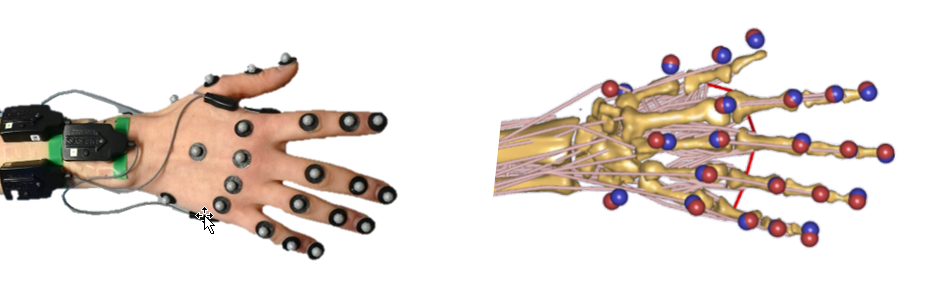
The hand model consists of 22 hand segments (including ulna and radius) modelled as rigid bodies linked by physiological idealized joints giving a total of 31 DOF. For the sake of reduced complexity the carpal bones where treated as one rigid body.
The Regensburg-Ulm-Hand-Model was developed by Lucas Engelhardt and Maximilian Melzner [4] from Ulm University and OTH Regensburg respectively.
References#
If you need to cite the model use the following references: