
Lesson 6: Generalizing muscles as recruited actuators#
Physiological muscles are incredible machines. Despite numerous attempts, it has been challenging to create technical actuators that are as lightweight and efficient as natural muscles. Additionally, mathematical modeling of muscles is a complex task. However, once the modeling is complete, we can leverage certain muscle properties to our advantage. We aim to develop “muscles” with a more versatile formulation compared to physiological muscles, which are limited to acting along strings.
See also
There is an an entire tutorial lesson devoted to the subject Kinematic Measures in the section on The Mechanical Elements.
The solution to our problem involves two classes: AnyRecruitedActuator and
AnyMuscleGeneric. These classes can act on Kinematic Measures, which are an
abstract class representing anything you can measure on a model.
For example:
A recruited actuator that works on a distance measure between two points acts as a linear force provider or a reaction provider, meaning that the force is not predetermined but will adjust to achieve equilibrium.
A recruited actuator that works on an angular measure, such as a joint angle, acts as a torque provider.
A recruited actuator that works on a Center of Mass measure acts as an abstract force that affects all segments of the body contributing to the center of mass.
Both classes are similar, but AnyRecruitedActuator is used for
non-physiological elements like boundary conditions, contact forces, and
residual forces. On the other hand, AnyMuscleGeneric is used for forces and
moments that still represent the effect of real muscles, such as joint torques.
The activity of AnyMuscleGeneric is included in the MaxMuscleActivity output
variable of the model.
In this lesson, we will demonstrate how recruited actuators (and generic muscles) can be used for various modeling tasks.
Recruited joint torque providers#
One of the goals of the AnyBody Modeling System is to create detailed models of the musculoskeletal system. However, there are cases where traditional inverse dynamics analysis is useful. In this type of analysis, the muscles are not considered and the body is balanced solely by joint torques. This approach can provide valuable insights into the function of limbs and joints, and it is computationally efficient.
Note
Since we imagine the joint torques is the sum of our real muscle contributions we
will use the class AnyMuscleGeneric instead of AnyRecruitedActuator.
You can perform joint torque inverse dynamics by using a generic muscle
(AnyMuscleGeneric). This replaces the body’s natural muscles at the joints.
The “muscle forces” that the generic muscles calculate will be the same as the
joint torques.
The previous examples aren’t ideal for exploring joint torques. So, you should download a new example to start with. This example is a simplified version of the simple arm example from the “Getting Started with AnyScript” tutorial, but with the muscles removed. The model consists of two segments - an upper arm and a forearm. It’s attached to the global reference frame at the shoulder and has a 100 N vertical load acting downwards at the hand.
Currently, the model can’t perform an inverse dynamics analysis because it lacks muscles. If you try to run the InverseDynamics operation, you’ll see an error message:
NOTICE(OBJ1): MuscleDemo.6.any(103): ArmStudy.InverseDynamics: No muscles or other recruited actuators in the model.
ERROR(OBJ1): MuscleDemo.6.any(103): ArmStudy.InverseDynamics: No solution found: There are fewer unknown forces (muscles and reactions) than dynamic equations.
This error message means that the model can’t be balanced without muscles. But we won’t add real muscles. Instead, we’ll add generic muscles to the revolute joints. The easiest way to add a generic muscle is from the class list. Just place your cursor after the Drivers folder, find the AnyGeneralMuscle in the class tree, and insert a template.
AnyFolder Drivers = {
//---------------------------------
AnyKinEqSimpleDriver ShoulderMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Shoulder;
DriverPos = {-1.7};
DriverVel = {0.4};
Reaction.Type = {Off};
}; // Shoulder driver
//---------------------------------
AnyKinEqSimpleDriver ElbowMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Elbow;
DriverPos = {1.5};
DriverVel = {0.7};
Reaction.Type = {Off};
}; // Elbow driver
}; // Driver folder
AnyMuscleGeneric <ObjectName> =
{
//viewForce.Visible = Off;
//MetabModel = Null;
//FatigueModel = Null;
//MuscleModel = Null;
//Type = NonPositive;
AnyMuscleModel &<Insert name0> = <Insert object reference (or full object definition)>;
AnyKinMeasure &<Insert name0> = <Insert object reference (or full object definition)>;
};
Just as normal muscles, generic muscles must be associated with a muscle model. Let us insert a simple one:
AnyMuscleModel <ObjectName> = {
F0 = 0;
//Lf0 = 0;
//Vol0 = 0;
};
AnyMuscleGeneric <ObjectName> =
{
//viewForce.Visible = Off;
//MetabModel = Null;
//FatigueModel = Null;
//MuscleModel = Null;
//Type = NonPositive;
AnyMuscleModel &<Insert name0> = <Insert object reference (or full object definition)>;
AnyKinMeasure &<Insert name0> = <Insert object reference (or full object definition)>;
};
The empty fields in the muscle model must be filled in:
AnyMuscleModel MusModel = {
F0 = 100.0;
};
Note that the simple muscle model class has the optional memebers (parameters) of Lf0 and
Vol0 that are usually left out for use with AnyMuscleGeneric.
We shall associate the muscle with the shoulder joint:
AnyMuscleModel MusModel = {
F0 = 100.0;
};
AnyMuscleGeneric ShoulderTorque =
{
//viewForce.Visible = Off;
//Type = NonPositive;
AnyMuscleModel &Model = .MusModel;
AnyKinMeasure &Angle = .Jnts.Shoulder;
};
Providing a torque for the shoulder is not enough. We also need a torque in the elbow:
AnyMuscleGeneric ShoulderTorque =
{
//viewForce.Visible = Off;
//Type = NonPositive;
AnyMuscleModel &Model = .MusModel;
AnyKinMeasure &Angle = .Jnts.Shoulder;
};
AnyMuscleGeneric ElbowTorque =
{
//viewForce.Visible = Off;
//Type = NonPositive;
AnyMuscleModel &Model = .MusModel;
AnyKinMeasure &Angle = .Jnts.Elbow;
};
Having provided torques for the shoulder and elbow we can try to run the inverse dynamic analysis again.
If you try to run the program now, you’ll encounter a new error message:
ERROR(OBJ.MCH.MUS4): MuscleDemo.6.any(125): ArmStudy.InverseDynamics: Muscle recruitment solver: infeasible problem with upper bounds
This error occurs because generic muscles, like normal muscles, can only act in
one direction. The Type variable controls this direction. If the muscle acts in
the positive direction of the joint angle, set Type = NonNegative. If it acts in
the negative direction, set Type = NonPositive.
Note
The terms NonNegative and NonPositive can be confusing. They will be changed in future software versions. The current terms were chosen to show that the force/moment can also be zero, meaning it can be zero or positive/negative.
In this case, the external load tends to move in the negative angle direction for both the shoulder and elbow. So, the muscles should counteract in the positive direction.
AnyMuscleGeneric ShoulderTorque =
{
//viewForce.Visible = Off;
Type = NonNegative;
AnyMuscleModel &Model = .MusModel;
AnyKinMeasure &Angle = .Jnts.Shoulder;
};
AnyMuscleGeneric ElbowTorque =
{
//viewForce.Visible = Off;
Type = NonNegative;
AnyMuscleModel &Model = .MusModel;
AnyKinMeasure &Angle = .Jnts.Elbow;
};
Now, you can run the InverseDynamics operation. After running it, open a new
Chart View. Look up the two joint torques as the Fm property of the general
muscles. You can plot both of them at the same time using an asterisk (*),
like this Main.ArmStudy.Output.Model.*Torque.Fm.
In this example, we used the same strength (muscle model) for both joints. But in reality, maximum joint torque varies a lot. For example, knee extension strength is much larger than elbow extension strength. If you’re modeling this, you can define joint torque muscles with strengths similar to the available joint torque. This way, the system can estimate how much of each joint’s strength is used in a given situation. You can also define different strengths for extension and flexion muscles in a joint. This can account for the difference in strength in the knee in these two directions.
Important Remark:
Another benefit of using generic muscles as joint torque providers is that you can handle closed loops and other statically indeterminate situations. Traditional inverse dynamics can’t treat these because the equilibrium equations don’t have a unique solution. The muscle recruitment algorithm will distribute the load between joints based on their individual strengths. So, it’s important to have reasonable estimates of joint strengths for this type of situation
Contact and other boundary conditions#
Muscles can only exert force in one direction, which is a characteristic shared by many mechanical phenomena, especially contact phenomena. Here are some examples of contact problems in biomechanics:
The contact between a foot and the floor
The contact between the upper thighs and a chair seat
The contact between two surfaces in a joint
Muscle forces and contact forces both have limits. Muscle forces are limited by muscle strength. Contact forces may seem unlimited, but they can be limited by friction and pressure on the tissues. For example, if you have a stone in your shoe, you’ll likely put less weight on that foot.
Muscles create equilibrium and are constrained by available contact forces. These forces often have different limits in different directions. For example, there’s a high limit in compression against a supporting surface, a smaller limit for friction, and no reaction in tension. This is similar to how muscles work, and these conditions affect the entire system’s mechanics.
We’ll make some changes to the simple arm model to explore contact in more detail. Let’s imagine that the model’s hand has a vertical wall for support. We need to change the kinematics so the arm slides along the wall. It’s hard to figure out the joint angle variations needed for vertical hand movement, so we’ll drive the hand directly instead.
}; // END of Jnts folder
AnyKinLinear HandPos = {
AnyRefFrame &ref1 = .GlobalRef.Shoulder;
AnyRefFrame &ref2 = .Segs.LowerArm.PalmNode;
};
AnyFolder Drivers = {
AnyKinEqSimpleDriver HandDriver = {
AnyKinLinear &Measure = ..HandPos;
MeasureOrganizer = {0,1};
DriverPos = {0.45, -0.6};
DriverVel = {0, 0.5};
Reaction.Type = {Off, Off};
};
/*
//---------------------------------
AnyKinEqSimpleDriver ShoulderMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Shoulder;
DriverPos = {-1.7};
DriverVel = {0.4};
Reaction.Type = {Off};
}; // Shoulder driver
//---------------------------------
AnyKinEqSimpleDriver ElbowMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Elbow;
DriverPos = {1.5};
DriverVel = {0.7};
Reaction.Type = {Off};
}; // Elbow driver
*/
}; // Driver folder
The previous two joint angle drivers have been disabled to avoid making the system kinematically over-determined. The new driver now controls the two degrees of freedom that were previously managed by the disabled drivers.
The line Reaction.Type = {Off, Off}; indicates that the wall currently doesn’t
provide any reaction forces to the arm.
When you plot the MaxMuscleActivity, you’ll see that the muscle activity
remains fairly constant. This is because the moment arms are also constant. The
gravity and the applied load of 100 N are both vertical.
You might think that a horizontal support wouldn’t make much of a difference. But let’s test this by turning on the horizontal support of the HandDriver:
Reaction.Type = {On, Off};
This shows that mechanics can be more complex than expected. Even this simple mechanical system behaves differently from what we might anticipate:
You’ll see that the muscle activity is much lower at the start of the movement when the reaction is on, and it’s similar towards the end of the movement. It seems like the muscles can use the horizontal reaction force to their advantage, depending on the posture of the mechanism.
However, real walls don’t work like that; they can only provide reaction pressure, not tension. We can simulate this with a Recruited Actuator. First, let’s switch the reaction off again:
Reaction.Type = {Off, Off};
Subsequently we define a AnyRecruitedActutor object:
}; // END of Driver folder
AnyRecruitedActuator WallReaction = {
Type = NonPositive;
Volume = 1e-6; // Ignore this value. Only used in special volume weighted recruitement
Strength = 10000;
AnyKinMeasureOrg Org = {
AnyKinMeasure &wall = ..HandPos;
MeasureOrganizer = {0};
};
};
Two things to note here:
The recruited actuator is much stronger than the joint muscles. This is because we assume the wall is very strong.
The ForceDirection (
Type) property isNonPositive. This means the force works in the opposite direction of the Kinematic measure, i.e., in the negative global x direction, just like a contact force with the wall would.
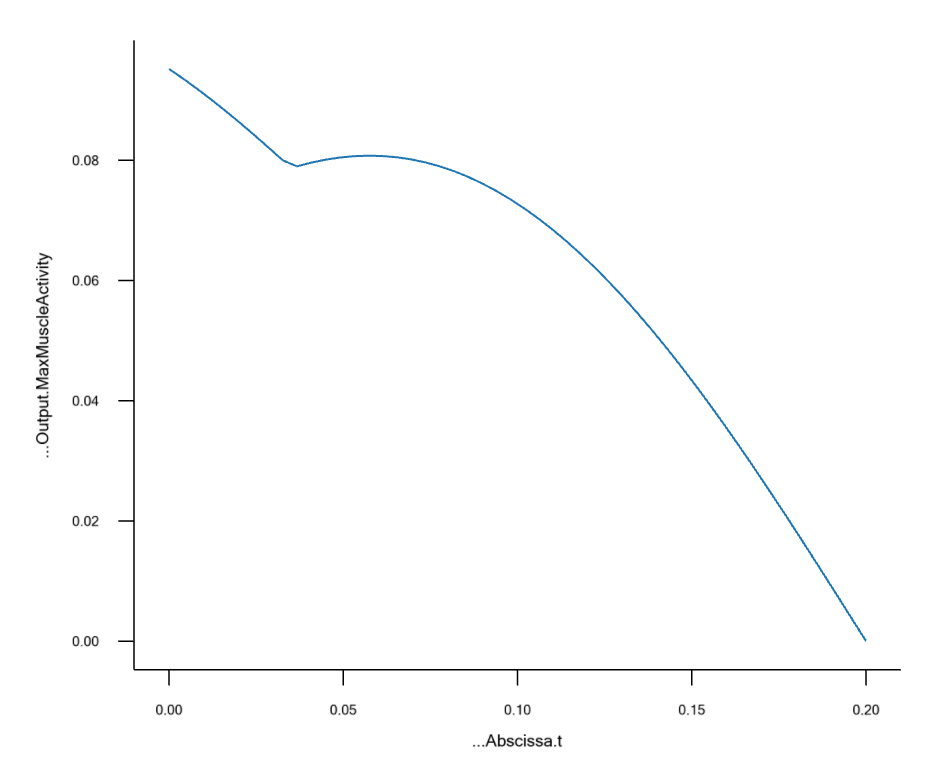
When you run the InverseDynamics operation again and plot the two joint
torques, you’ll see the following graph. You can plot them simultaneously with
the specification line Main.ArmStudy.Output.Model.*Torque.Fm:
The blue curve represents the shoulder joint torque, and the orange curve
represents the elbow torque. Notice that the envelope of these two curves is
identical to the MaxMuscleActivity curve we plotted earlier for the case of no
support.
You might think that the support would be beneficial in the final stages of the movement where the arm could rest against the wall. It is beneficial for the elbow, but the reaction force also increases the torque about the shoulder. Since the shoulder (red curve) has the higher load of the two, this limits the benefit of the support.
Let’s see what happens if we turn the reaction force the other way, like if the hand could pull against the far side of the wall:
AnyRecruitedActuator WallReaction = {
Type = NonNegative;
Volume = 1e-6; // Ignore this value. Only used in special volume weighted recruitement
Strength = 10000;
AnyKinMeasureOrg Org = {
AnyKinMeasure &wall = ..HandPos;
MeasureOrganizer = {0};
};
};
When you run the model again and look at the same graphs, you’ll see this:
The wall is helpful in the initial stages of the movement. The torque generated by the reaction force benefits both joints. In the later stages, the wall slightly reduces the muscle forces, but it increases the elbow torque. This happens because the elbow can exert more force than needed to carry the load, creating additional pressure against the wall. This, in turn, reduces the shoulder torque.
This example shows how complex body mechanics can be. Even this very simplified case would have different outcomes if the model’s parameters were different. For example, if the shoulder were much stronger than the elbow, the elbow wouldn’t be able to help the shoulder in the latter case because the elbow would have a higher load compared to its strength. Conversely, the shoulder could help the elbow in the former case by generating an additional force pushing against the wall.
This concludes the part of this tutorial dealing with muscles. But we’re not done yet. The next lesson deals with the important topic of ligament modeling.