
Posture Prediction Model#
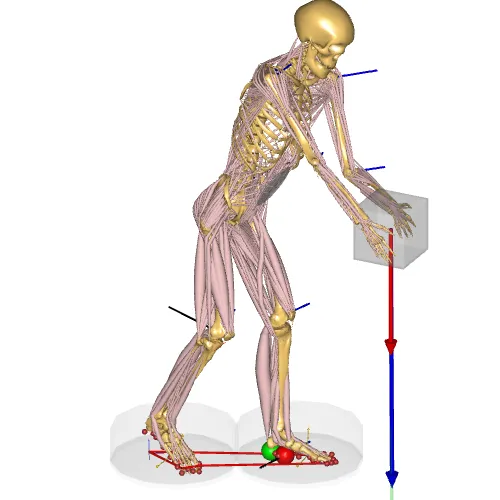
This is a model which can predict the posture as a consequence of applied loads in hands. It does this by minimizing joint torques and applying balance drivers which account for external applied loads.
- The model is driven by a combination of the following drivers:
Drivers which minimize the joint moments (arising from gravity and applied loads in hands) in elbow, shoulder, L4L5 and knee
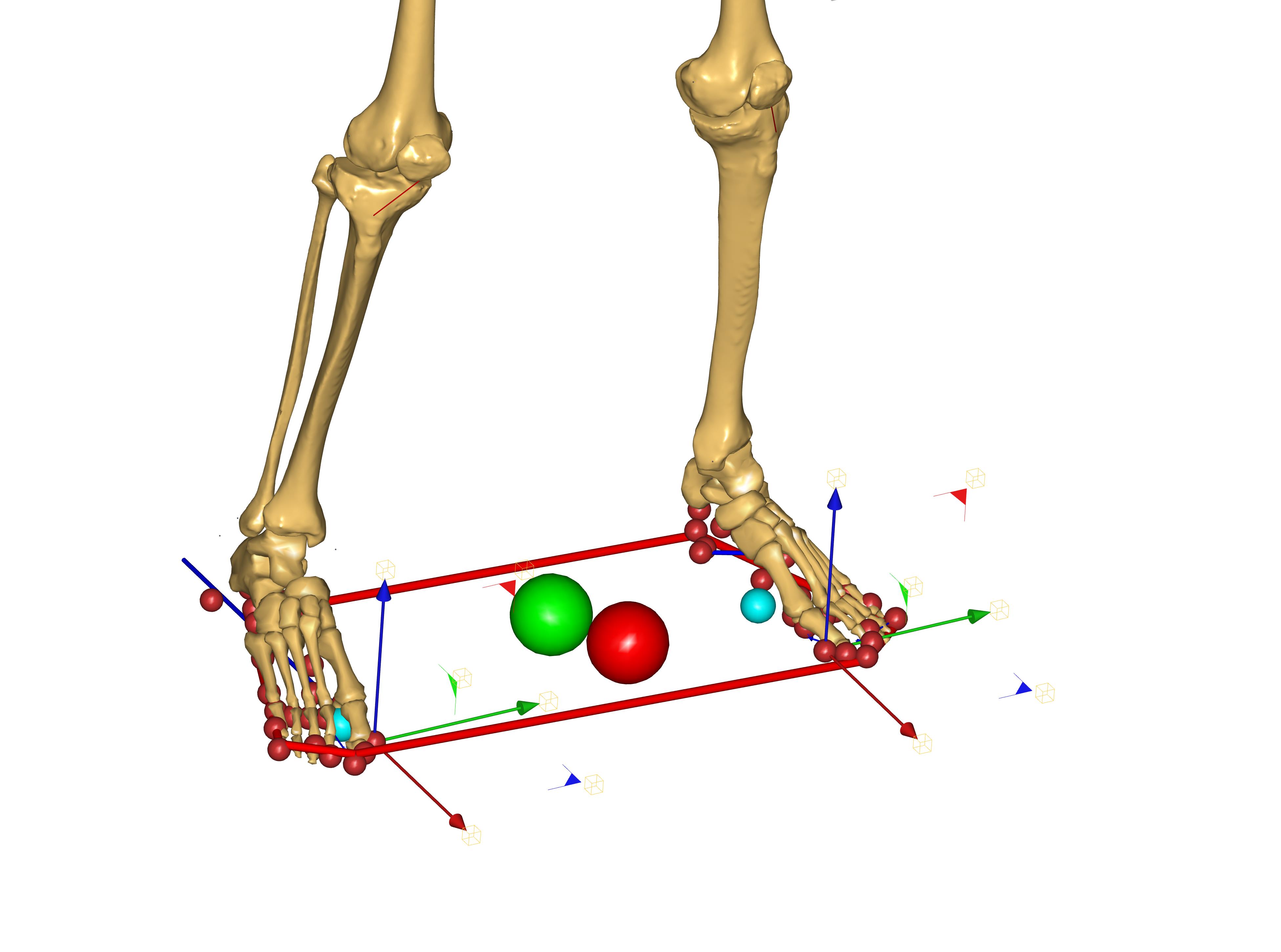
Driver which tries to keep the CoP inside the foot stance area.
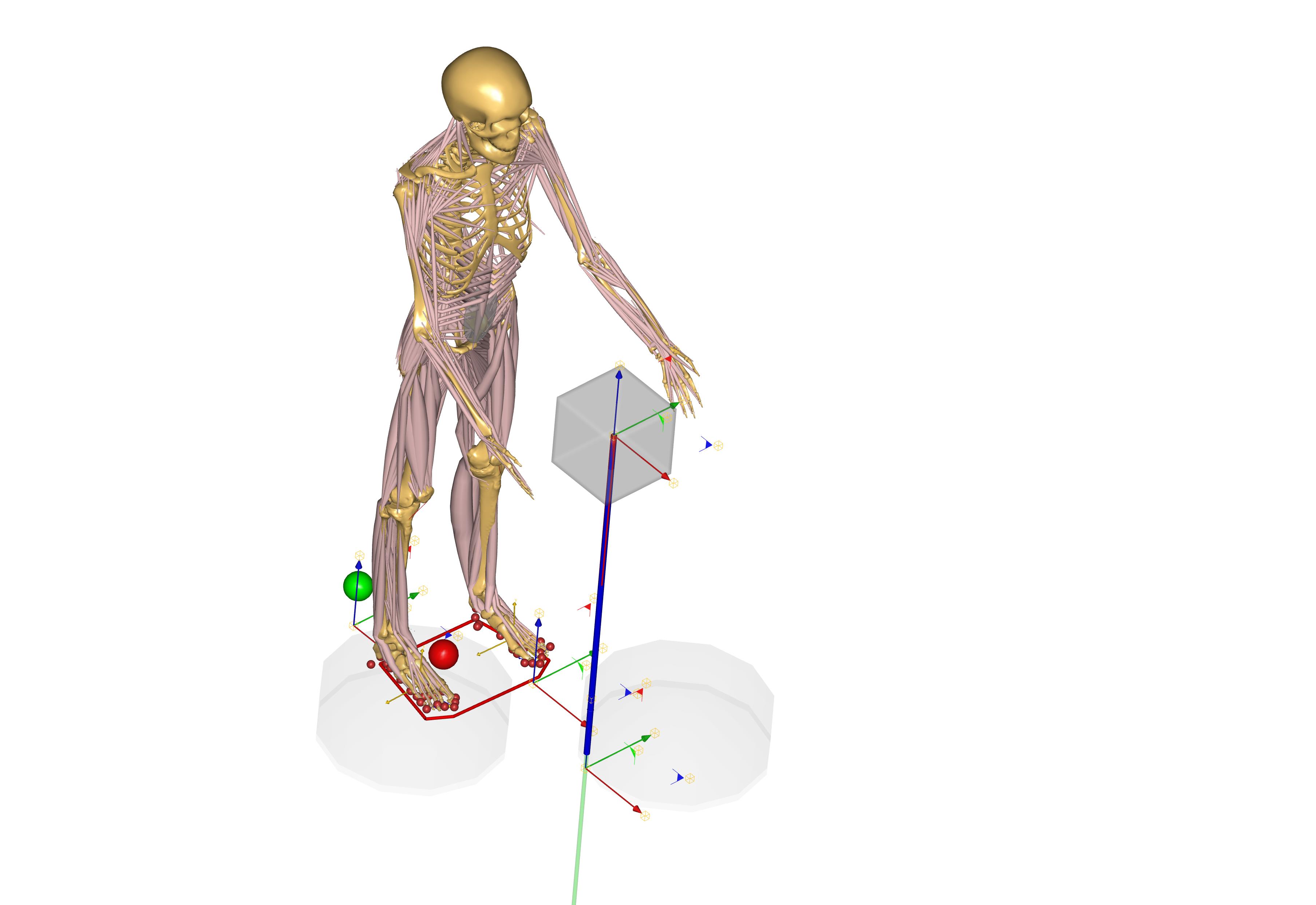
Feet maintain contact with the ground, but the position can be controlled by widgets
Hands are linked to an object, of which positioning can be altered using widgets
Two type of loads can be applied, either a fixed weight of the object and/or a force vector.
In Model Repository:
Application /Examples /StandingPosturePredictionWithLoad /StandingPosturePrediction.main.any
Usage#
- To run the model
Load the model
The example model has a force vector applied on the object, currently the object has no weight (this is editable)
AnyVar ObjectWeight = 0; //weight of mass applied
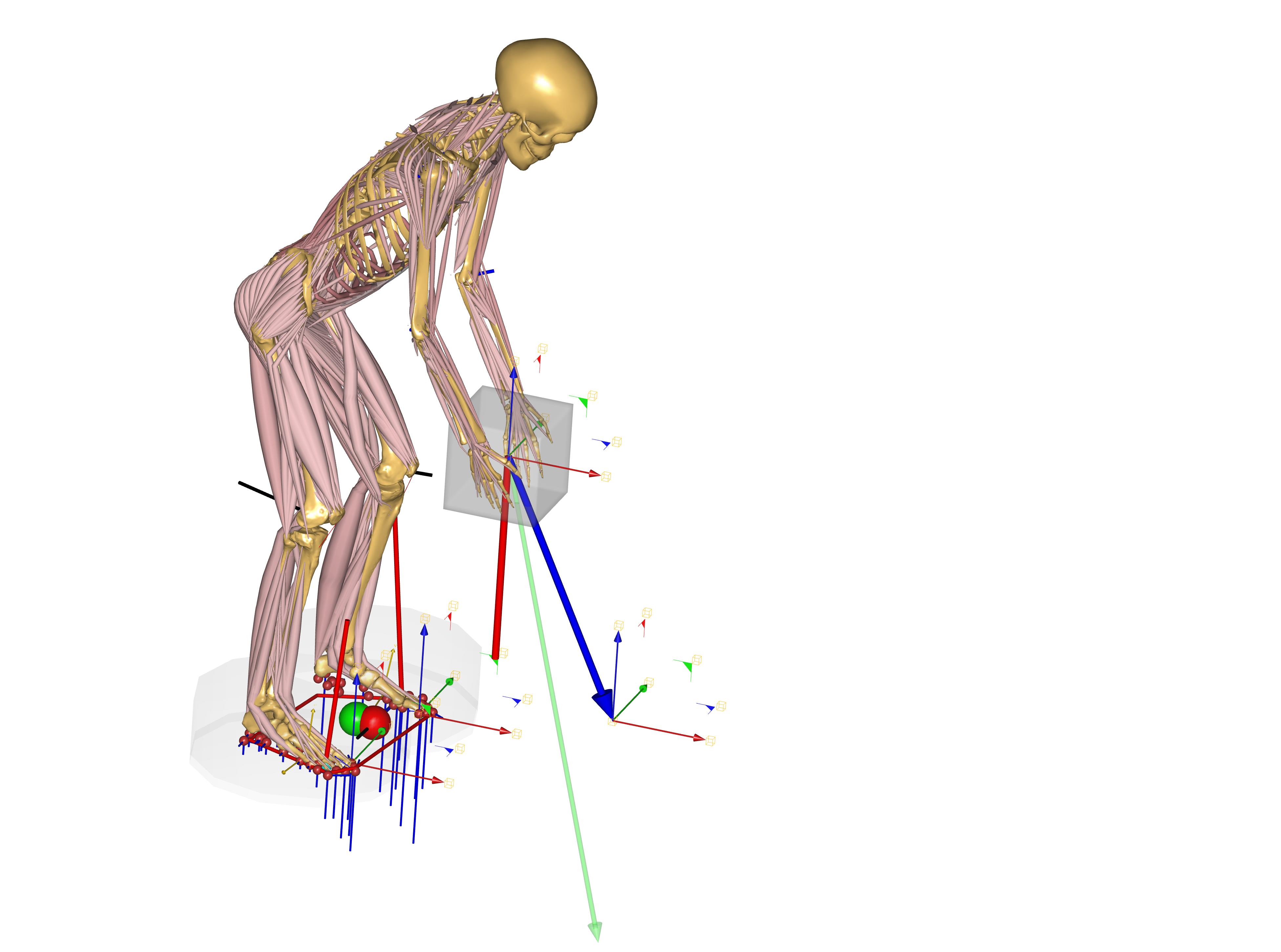
Try to drag (click and drag) one of the widgets in the ModelView (seen as small coordinate systems). For example the force vector widget:
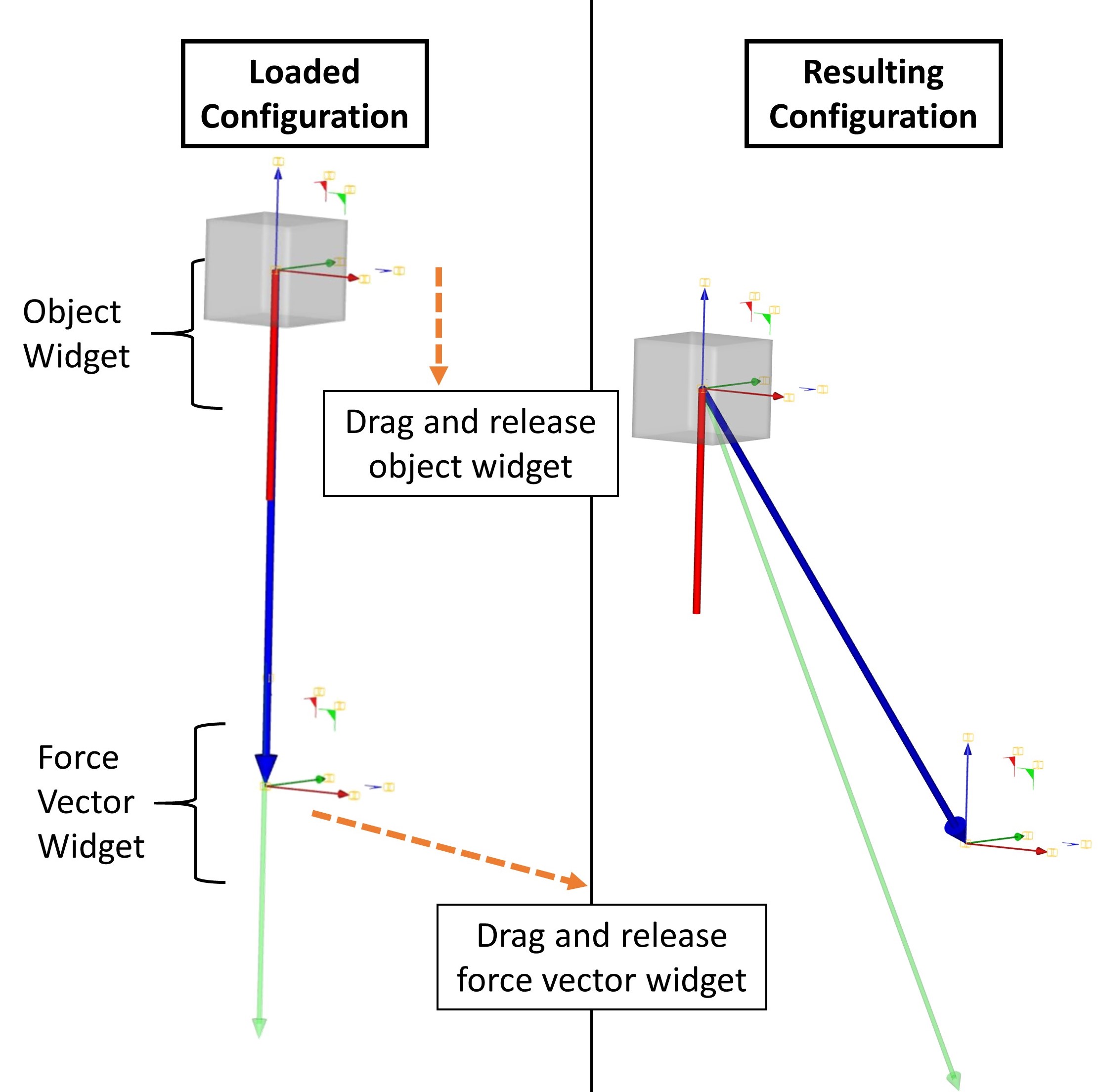
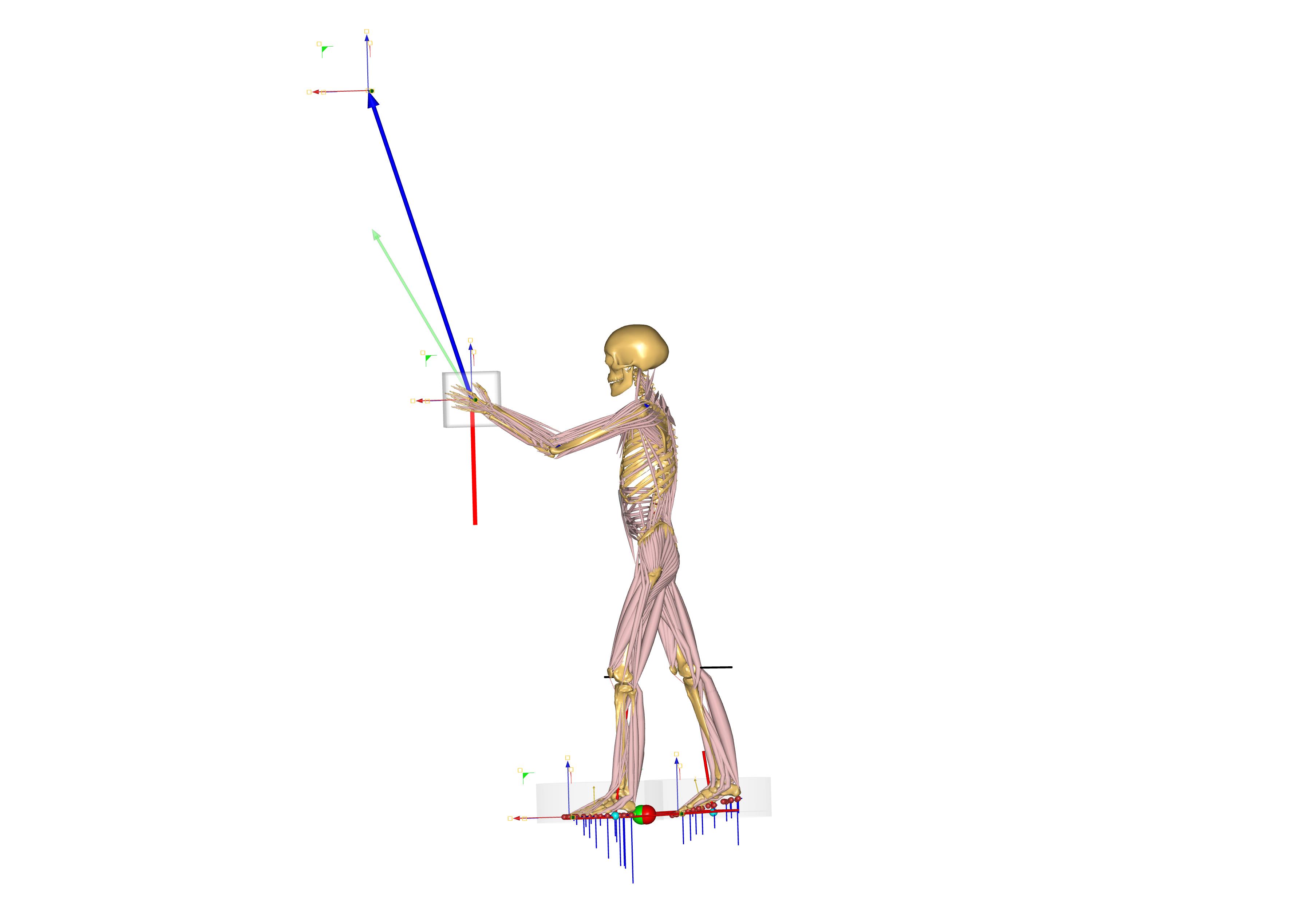
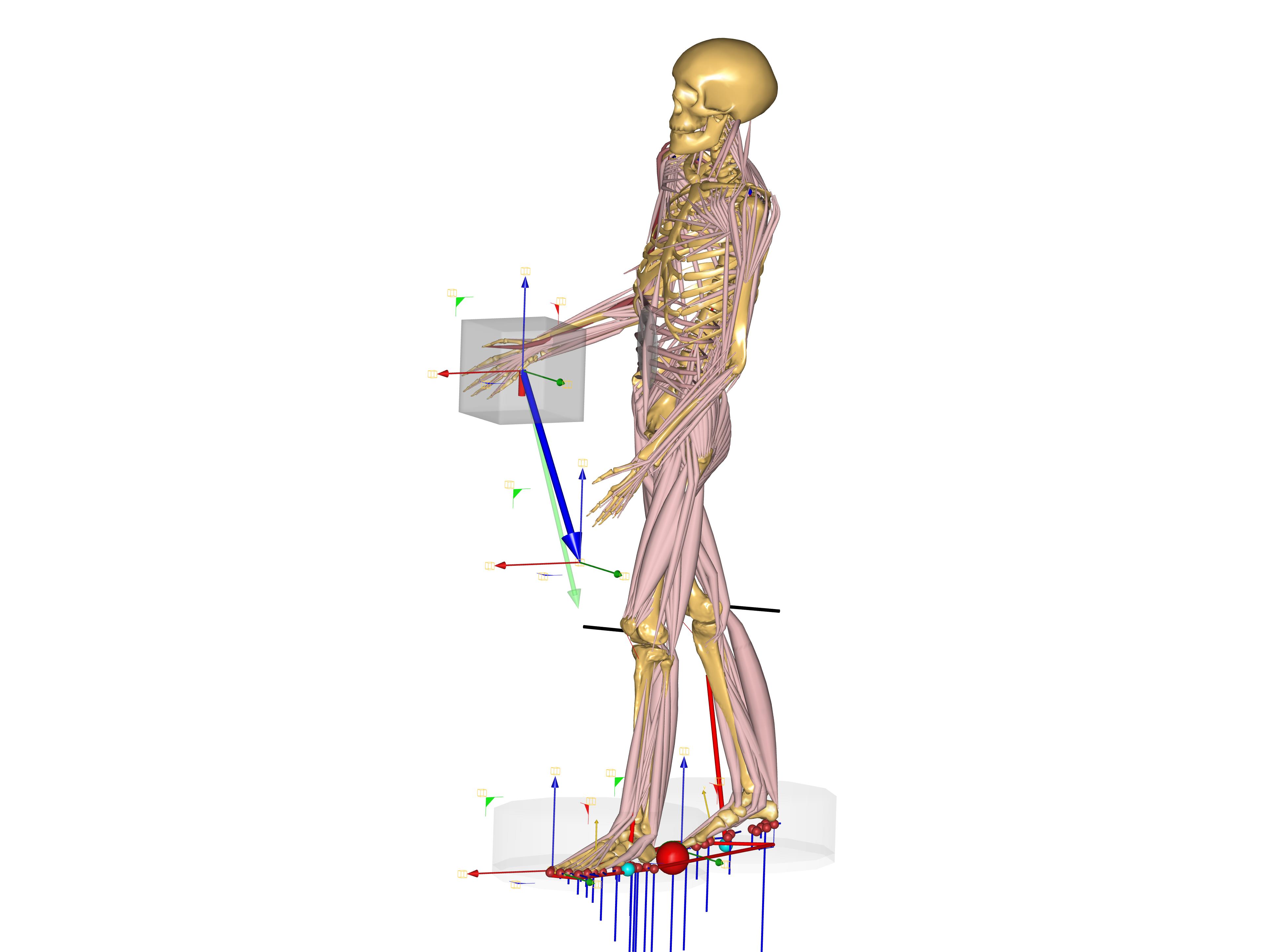
When the widget is release the model will run the analysis. The Force vector is shown by the blue arrow, the weight of the object is represented by a red line, and the resulting reaction force is depicted by the green arrow.
There are three remaining widgets, 2 controlling the starting position of the feet, and 1 controlling object’s location.
The model can also be adjusted to apply the load to both hands or a single hand. Three combinations can be made using the define statements
#define LoadInRightHand 1
#define LoadInLeftHand 1
In the following example a force vector is applied to only the right hand.
The following video shows an example of how you can manipulate the multiple widgets to achieve different predictive postures:
Please note the speed of the video was increased for viewing purposes.