
Twente Lower Extremity Model v.2.2#
The Twente lower extremity model version 2 (TLEM2) is a successor to the TLEM 1 model. It contains 6 DOF and 169 muscles.
Example Configuration#
Short example of how to configure the model with the TLEM model, Hill type muscle model and only one leg:
See also
The Leg configuration parameters for a full list of configuration parameters.
#define BM_LEG_MODEL _LEG_MODEL_TLEM2_
#define BM_LEG_RIGHT ON
#define BM_LEG_LEFT OFF
#define BM_LEG_MUSCLE _MUSCLES_3E_HILL_
Background#
The model is based on published anatomical data produced from a cadaver study in the TLEMsafe EU project. The first implementation of the musculoskeletal model was created by Vincenzo Carbone and René Fluit from the University of Twente [1].
The key feature of TLEM 2 compared to older TLEM 1 model is a consistent dataset, where both muscle attachment and bone surface scans are from the same subject. This makes TLEM2 the more anatomically consistent model. Bone contact at joints such as the knee thus consists of naturally congruent surfaces, making it easier to implement Force Dependent Kinematics on joint movements (see tutorial)
The model was refined during the Life Long Joints project where its anatomical fidelity and joint force prediction accuracy were improved by De Pieri et al. [2], mainly, by implementing better a wrapping surfaces for the muscles (TLEM v2.1).
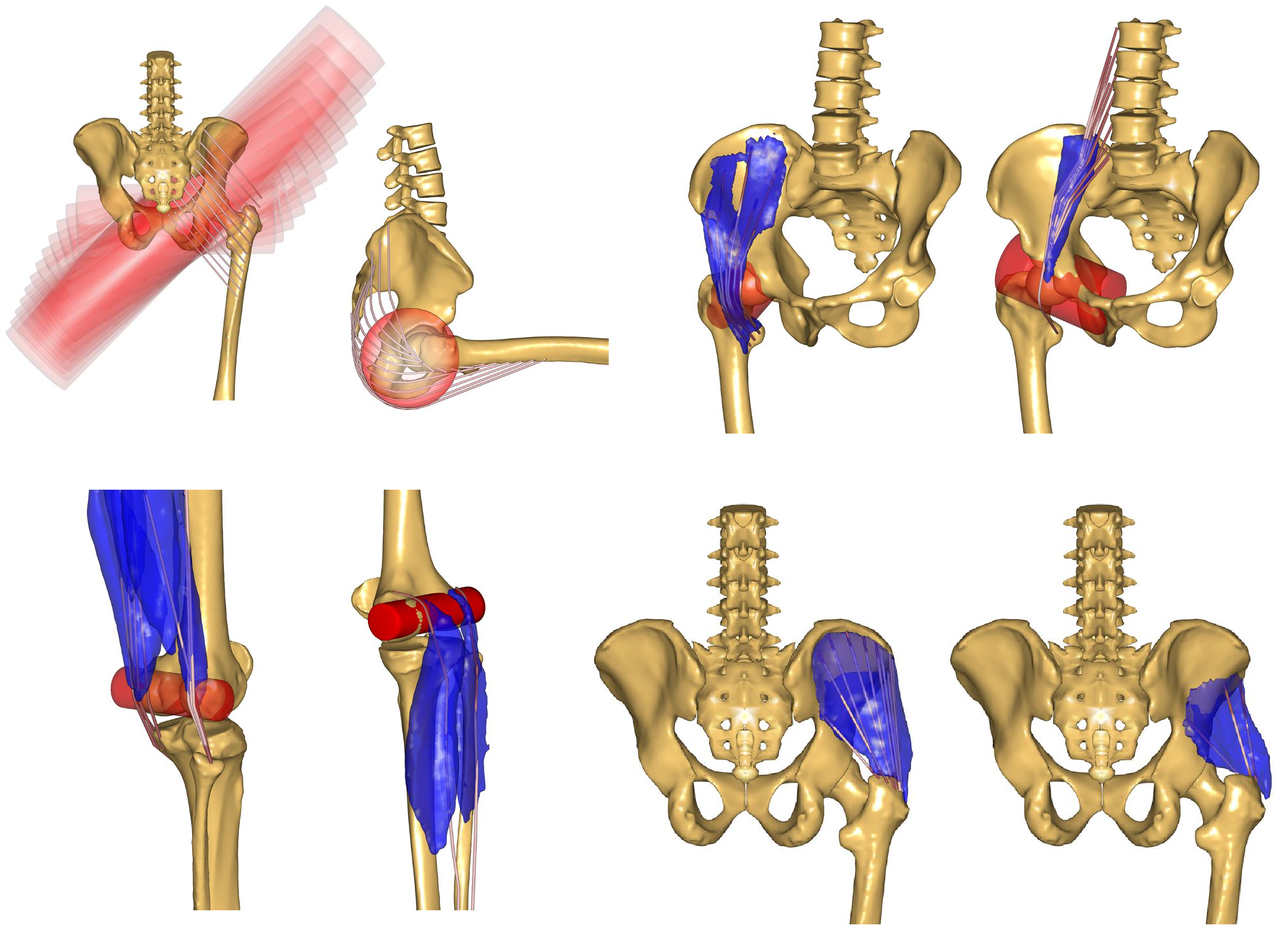
Fig. 7 New wrapping surfaces for (clockwise) Gluteus Maximus, Ilio-Psoas, Gluteus Medius & Minimus, Hamstrings & Gastrocnemius. All figures are from the publication by De Pieri et al. [2]#
Subsequently, the model has been updated again (currently TLEM v2.2) with muscle wrapping for the Achilles tendon, as well as updates to the implementation of the ankle complex in preparation for new multi segment foot models.
Resources#
More details on the TLEM2 model can be found online:
History and changes:#
- TLEM v2.2 (Released in AMMR 3.0.0)
Wrapping surfaces have been added to the Achilles tendon around the ankle in the TLEM 2 leg model (now designated TLEM 2.2). This ensures an even ratio of moment arms between the soleus and gastrocnemius muscles. Hence, gastrocnemius is recruited less, especially during downhill walking and stair descent, solving the tendency of the model to overpredict the knee contact forces at toe off. This is the first of a number of improvements to the leg model by Dr. Enrico De Pieri, who is working on a publication on improvements and validation of the TLEM 2 leg model.
The ankle complex has been redefined to compensate for the non-neutral position in which the cadaver was scanned. The method described in Stolle et al.[3] was adapted to identify coordinate systems at the tibia, talus, and calcaneus using their respective bone surfaces. The coordinate systems were then used to reposition the bone surfaces using the average values provided in Stolle et al.[3] for talus-calcaneus and calcaneus-tibia. These values are based on weight-bearing scans in neutral, bilateral standing position of 95 healthy adult subjects. This improves the alignment of the tibia, talus, and calcaneus bones.
With the redefined alignment of the ankle complex, the ankle joint axis was updated using the method described in Montefiori et al.[4] The joint axis was defined as the axis of a cylinder fitted to the talar trochlea. The ankle joint centre was defined at the midpoint of the medial and lateral malleoli projected on the ankle axis.
The knee joint was also updated to compensate for the non-neutral scan of the cadaver. The updated joint ensures that the patella tendon is straight in the neutral position. The net effect is rotation of the tibia about its long axis with the feet still pointing in the same direction in the neutral position.
The foot and talus models have several updates in preparation for the release of advanced multi-segment foot models in the future:
The talus coordinate system is updated to be coincident with the foot coordinate system in the neutral position. This facilitates scaling of subject-specific foot models that would normally include the foot and talus in the same coordinate system. For backwards compatibility, a new reference node,
TalusCompatibilityFrameAMMR24, is created in the talus segment. This reference node has the same position and orientation as the previous coordinate system of talus.The update of the talus coordinate system allows reusing some of the parameters from the foot model and simplifies the code. The talus now uses the subtalar joint parameters from the foot model. The ankle joint parameters have been updated to be expressed in the new coordinate system. However, both joints are consistent with the previous implementation.
The anatomical frames of the foot and the talus are now defined using bony landmarks on the foot and the lateral and medial malleoli. The vertical axis is defined as the perpendicular to three coplanar points that can be considered parallel to the ground. In the new implementation, these are the lowermost points on heel, fifth metatarsal, and medial sesamoid on first metatarsal. This will update the neutral position of the foot and talus. Moreover, this will also affect the ankle plantarflexion and subtalar joint angles.
Warning
Ankle and Subtalar joint angle measures are updated. Please run
MarkerTrackingagain for mocap models if using TLEM 2.2.The malleoli coordinates in the foot coordinate system have been fixed to match the malleoli on the shank in the neutral position.
The model tree has been updated. The talus segment is moved inside the foot segment. For backwards compatibility, a pointer to the talus segment still exists outside the foot segment.
The following video compares TLEM v2.2 with TLEM v2.1 (in gray). The knee and and ankle joint axes in blue belong to TLEM v2.2 while the ankle joint axes in gray belongs to TLEM v2.1

Fig. 8 Comparison of TLEM v2.2 with TLEM v2.1 (in gray). Please note the patella tendon in gray inserts in TLEM v2.1 shank. It depicts the rotational offset of the tibia along its axis.#
- TLEM v2.1 (Released in AMMR 2.0.0)
Wrapping surfaces for several muscles were updated. These changes were engineered to result in realistic muscle coordination and hip contact forces as documented in the publication by De Pieri et al. [2]
Citing and references#
If you need to cite the model use the following references [2], [1]. Other useful papers using or related to the TLEM2 model are: [5] and [6].