
Squat#
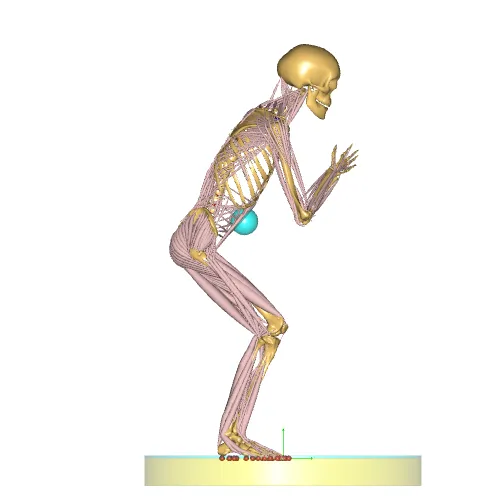
This model demonstrates parameterized squating motion.
Users can try to change different parameters of this model in the ‘Input\Parameters.any’ file including:
Time periood of a squat cycle
FPS(frames per second) for simulation
Minimum knee flexion angle of a squat cycle (in degrees)
Maximum knee flexion angle of a squat cycle (in degrees)
Distance between two medial contact nodes of both feet (in meters)
Rotation angle of both feet (in degrees)
Ground reaction force(GRF) of the human model is predicted and you can check the implementation of this GRF prediction in ‘Model\Supports.any’ file.
The parametric motion elements are defined in ‘Model\JointsAndDrivers.any’.
In Model Repository:
Application /Examples /Squat /Squat.main.any