
Lesson 5: Definition of Muscles and External Forces#
Note
Here’s an AnyScript file to start on if you have not completed the
previous lesson: demo.lesson5.any.
The model so far has been capable of motion despite lacking muscles. This is because a kinematic analysis that does not consider forces.
Skeletal muscles produce movement by pulling on our bones. Muscle actions are coordinated in complicated patterns determined by our central nervous system.
AnyBody helps you predict realistic muscle activation patterns for a given movement and external load.
Creating a muscle model#
The exact behaviour of muscle tissue is a widely researched (and debated) topic.
AnyBody offers several models of varying sophistication, for modelling muscle behaviour. A detailed introduction to muscle modeling can be found here its own tutorial.
Here, we will create a very simple muscle model and use it to model our arm model muscles. We start by creating a folder for the muscles:
}; // Driver folder
AnyFolder Muscles = {
}; // Muscles folder
The next step is to create a muscle model that defines the properties that will be assumed common for all the muscles.
Note
Since properties such as Max muscle strength, fiber length etc. differ between muscles, realistic AMMR human body models define unique muscle models for each muscle element.
}; // Driver folder
AnyFolder Muscles = {
// Simple muscle model with constant strength = 400 Newton
AnyMuscleModel MusMdl = {
F0 = 400;
};
}; // Muscles folder
Creating a muscle#
Since muscles can only pull, we need to define at least one muscle on each side of every revolute joint.
When working with models containing three-dimensional spherical joints, you may need more muscles. It can be quite difficult to figure out the minimum number of muscles required to drive a complex body model.
Let’s add just one muscle to start with, the elbow-flexor muscle named Brachialis:
AnyFolder Muscles = {
// Simple muscle model with constant strength = 400 Newton
AnyMuscleModel MusMdl = {
F0 = 400;
};
//---------------------------------
AnyMuscleViaPoint Brachialis = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..Segs.UpperArm.Brachialis;
AnyRefNode &Ins = ..Segs.ForeArm.Brachialis;
viewMuscle.Visible = On;
};
}; // Muscles folder
This muscle is created by the AnyMuscleViaPoint class. These are muscles which begin at
an origin point, pass through a number of pre-defined via points, and finally terminate
at the insertion.
Org and Ins are the origin and insertion of the Brachialis. They are reference objects,
pointing to reference nodes named “Brachialis” that have already been created on the “UpperArm” and “ForeArm”.
The Brachialis muscle in our model lacks via-points. However if a muscle has via points, we must insert
reference objects to respective via-point nodes in the lines between Org and Ins, in the correct order.
The physiological behavior of the muscle is defined by the first line:
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
You can see that it points right back to the muscle model we have already created (Notice the two leading dots). Finally, the following line displays the muscle in your model view window:
viewMuscle.Visible = On;
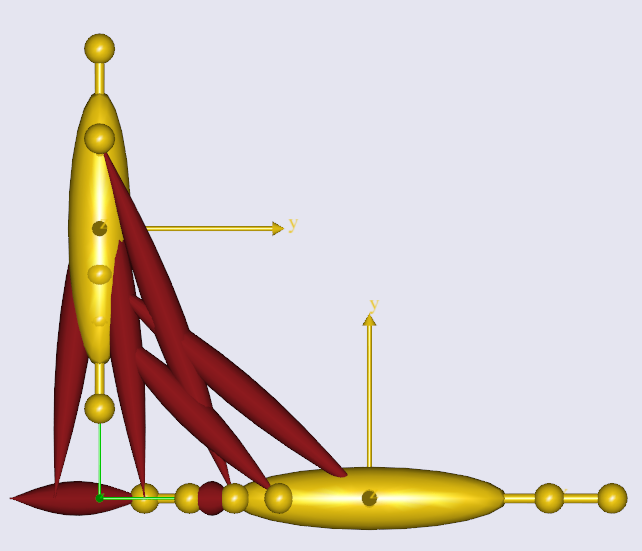
Upon re-loading the model, you should see a thick, red line connecting the muscle’s origin and insertion points. There are other ways to visualize muscles, and these are described here in a dedicated muscletutorial.
The muscle path may appear strange because the mechanism hasn’t been assembled by a kinematic analysis.
Adding more muscles#
All the other muscles are defined in the same way. Your model should resemble the image seen further below:
//---------------------------------
AnyMuscleViaPoint Brachialis = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..Segs.UpperArm.Brachialis;
AnyRefNode &Ins = ..Segs.ForeArm.Brachialis;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint DeltodeusA = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..GlobalRef.DeltodeusA;
AnyRefNode &Ins = ..Segs.UpperArm.DeltodeusA;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint DeltodeusB = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..GlobalRef.DeltodeusB;
AnyRefNode &Ins = ..Segs.UpperArm.DeltodeusB;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint Brachioradialis = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..Segs.UpperArm.Brachioradialis;
AnyRefNode &Ins = ..Segs.ForeArm.Brachioradialis;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint BicepsShort = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..Segs.UpperArm.BicepsShort;
AnyRefNode &Ins = ..Segs.ForeArm.Biceps;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint TricepsShort = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..Segs.UpperArm.TricepsShort;
AnyRefNode &Ins = ..Segs.ForeArm.Triceps;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint BicepsLong = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..GlobalRef.BicepsLong;
AnyRefNode &Ins = ..Segs.ForeArm.Biceps;
viewMuscle.Visible = On;
};
//---------------------------------
AnyMuscleViaPoint TricepsLong = {
AnyMuscleModel &MusMdl = ..Muscles.MusMdl;
AnyRefNode &Org = ..GlobalRef.TricepsLong;
AnyRefNode &Ins = ..Segs.ForeArm.Triceps;
viewMuscle.Visible = On;
};
}; // Muscles folder
The InitialConditions analysis#
Your model (in the image above) doesn’t appear to be connected properly at the elbow because AnyBody only enforces the joint constraints during a simulation.
Use the operation drop down menu to run the “InitialConditions” operation. If you don’t remember how this is done, refer to this prior tutorial.
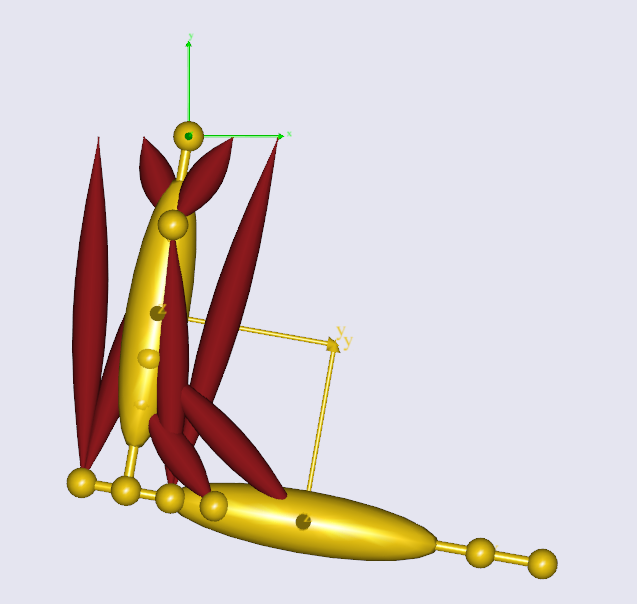
The assembled model should resemble the following figure.
Switching off driver reactions when muscles do the job (Important!)#
Even though you haven’t added any external forces to your model, the model still requires some assistive force to hold up its own weight. Note that you’ve specified a gravity vector in the “ArmModelStudy” object.
Note
A kinematic constraint needs to be enforced by an accompanying constraint force. For example, when you lean on a table, the normal reaction force on your hand maintains the surface-surface constraint between hand and table. Were it not for the force you would have fallen, with your hand passing through the table surface. Similarly motion constraints such as joint angle motions need a driving force to maintain the specified trajectory.
By default, all drivers in your model apply the necessary constraint forces (also called driver reactions) for their respective kinematic constraints.
The constraint “force” is actually a generalized force i.e. whether it is actually a force or torque depends on the type of measure that driver constrains. For example, a driver on a rotational measure, will apply torques, while one on a linear measure will apply forces. AnyBody reports all of these simply as “forces”, and it is up to you to interpret them.
The drivers for shoulder and elbow motion thus default to applying the required constraint reaction torques to sustain the joint motions. This is problematic, since we wish the muscles forces to be causing the motion instead.
👉 Now The default driver reactions must therefore be switched off by
setting the Reaction.Type property, for the muscles to cause the motion and
not the drivers.
AnyFolder Drivers = {
//---------------------------------
AnyKinDriver ShoulderMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Shoulder;
DriverPos0 = {-100*pi/180};
DriverVel0 = {30*pi/180};
Reaction.Type = {Off};
}; // Shoulder driver
//---------------------------------
AnyKinDriver ElbowMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Elbow;
DriverPos0 = {90*pi/180};
DriverVel0 = {45*pi/180};
Reaction.Type = {Off};
}; // Elbow driver
}; // Driver folder
On the other hand, the driver reactions come in handy in models under development, while you are still adding muscles or other force elements to enforce the constraints. The driver reactions will allow you to successfully run inverse dynamic simulations at the intermediate model stages, by ensuring dynamic consistency.
The single Off is encapsulated in braces, {Off}, because it is a vector. A
driver can theoretically have any number of total DOF from all the measures that
it drives. Therefore all data in a driver are vector quantities, even when it is
a 1 DOF driver.
An Alternative Driver - AnyKinMotion#
As an alternative to the AnyKinDriver class and setting the
Reaction.Type={Off}, you can also use the AnyKinMotion class. This other
driver is basically identical to the general AnyKinDriver, except that all
constraint reaction forces are by default switched off. This implies that this driver only
specifies motion but not a mechanical actuator that produces the motion. In
contrast, AnyKinDriver has reaction forces switched on by default, implying
that the object is an “infinitely strong” mechanical actuator that will produce
the motion no matter the external loads.
In the following studies, try using both drivers, to see that they generate the
same result. Make the following changes to use the AnyKinMotion driver (note,
the line defining the Reaction.Type is not needed):
AnyFolder Drivers = {
//---------------------------------
AnyKinMotion ShoulderMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Shoulder;
DriverPos0 = {-100*pi/180};
DriverVel0 = {30*pi/180};
}; // Shoulder driver
//---------------------------------
AnyKinMotion ElbowMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Elbow;
DriverPos0 = {90*pi/180};
DriverVel0 = {45*pi/180};
}; // Elbow driver
}; // Driver folder
Another important option for both of the drivers, is that you can define a
driver function - meaning the function for the movement of the driver. This is
done by defining a time-dependent function for the AnyParamFun option.
AnyParamFun is the base class for parameter functions that are functions of a
single scalar (floating point) quantity.
AnyBody contains a number of predefined function types that you can find in the
Classes Tree or in the Reference Manual, for instance AnyFunPolynomial. As the
name indicates, this is polynomial driver function:
AnyKinMotion ShoulderMotion = {
AnyRevoluteJoint &Jnt = ..Jnts.Shoulder;
DriverPos0 = {-100*pi/180};
DriverVel0 = {30*pi/180};
AnyFunPolynomial DriverFun = {
PolyCoef = {{0, 1, -0.9}};
};
};
In the matrix PolyCoef, each row contains the coefficients for a time
function driving one degree of freedom. The revolute joint we are
driving only has one degree of freedom, so the matrix only has one row,
but it still has to be defined as a matrix rather than a vector, i.e.
with double braces at each end. The polynomial coefficients then come in
increasing order and define the following driver function:
To get higher polynomial orders, simply add more terms to the vector. A common use is to drive motion either in a very standardized way, for instance with constant velocity or constant acceleration, or to drive a motion by data to which a polynomial has been fitted.
Note
In the following, we will NOT use any driver function, but simply the default
option. So, do not insert the above defined AnyFunPolynomial DriverFun.
Furthermore, it is optional to use either the AnyKinMotion or the AnyKinDriver class.
The InverseDynamicAnalysis and plotting muscle forces#
Run the the InverseDynamicAnalysis operation from the operations drop-down menu. In this analysis, the AnyBody system computes all muscle, joint forces and much more.
Review the instructions from this prior tutorial on plotting simulation results.
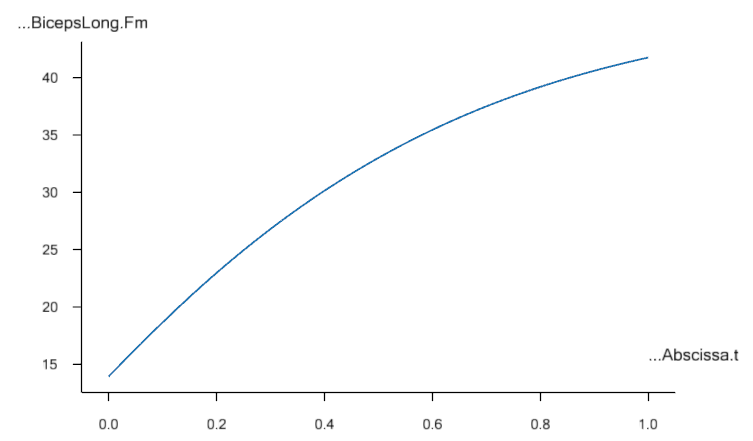
To plot the muscle forces in the brachialis muscle, open
Main.Study.Output.Model.Muscles.Brachialis in the chart view’s model tree, and
plot the variable named Fm. You should get a curve that looks like the one
below.

The drop in muscle force with movement progression is due to the decreasing moment arm of the gravity vector about the elbow joint, as the elbow flexes. Therefore lesser the muscle force.
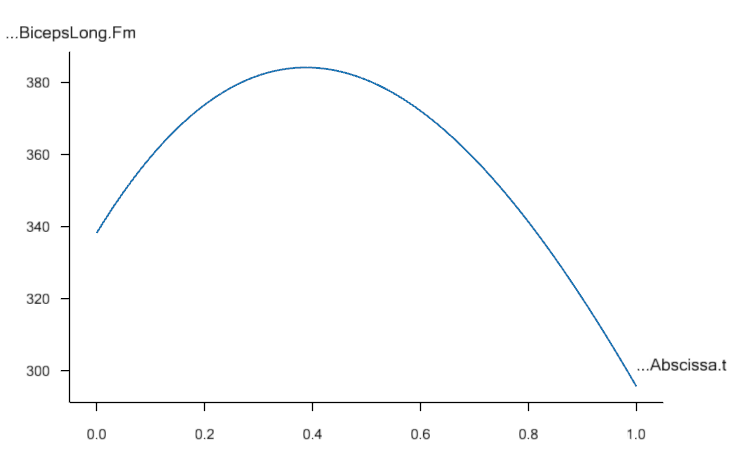
If you look at the muscle force in the BicepsLong, you see a different pattern:
This muscle’s force increases during the movement because this muscle supports both, the shoulder and the elbow. In addition, it collaborates both with DeltoidusA on shoulder flexion, and with the other elbow flexors, and all these muscles have to adjust their work in relation to each other.
Creating external loads#
You may want to investigate the model’s behavior in different loading situations, such as when the hand is carrying a dumbbell. Let us imagine that the model is performing a dumbbell curl.
We start by creating a node on the forearm at the location of the palm. Add this within the curly braces of the “ForeArm” object:
AnyRefNode PalmNode = {
sRel = {0.27,0,0};
};
}; // ForeArm
The next step is to add an external force. We make a new sub-folder for this purpose, within ArmModel:
}; // Muscles folder
AnyFolder Loads = {
//---------------------------------
AnyForce3D Dumbbell = {
AnyRefNode &PalmNode = ..Segs.ForeArm.PalmNode;
F = {0,-100,0}; // Force in Newton
};
}; // Loads folder
}; // ArmModel
Now you can reload the model and re-run inverse dynamics to analyze how the model reacts to a downward force of 100 N (approximately 10 kg dumbbell weight). The BicepsLong force again, you should see this:
Note
Applied forces do not have to be constant. They can change with time and other properties in the model. Please refer to the tutorial on forces for more details.
The muscle force is obviously much larger than before, and the development is also different. It now reaches a maximum during the movement and drops off again.
The model you’ve built here was anatomically simplified, and it can be a difficult job to define a realistic body model from scratch. We recommend that users start out with the body models available in the AnyBody Managed Model Repository.
Now, let’s continue to Lesson 6: Adding real bone geometrics.