
Appendix: Morphing based on landmarks#
This tutorial is an appendix to the Lesson 1, where construction of an advanced scaling function is introduced.
This lesson is a brief introduction to the interpolation functions based on
the nonlinear Radial Basis Functions (RBF) approach, which is used as
the core of advanced transformations. AnyFunTransform3DRBF and
AnyFunTransform3DSTL classes are covered by this lesson.
Nonlinear Point Based Scaling Transformation#
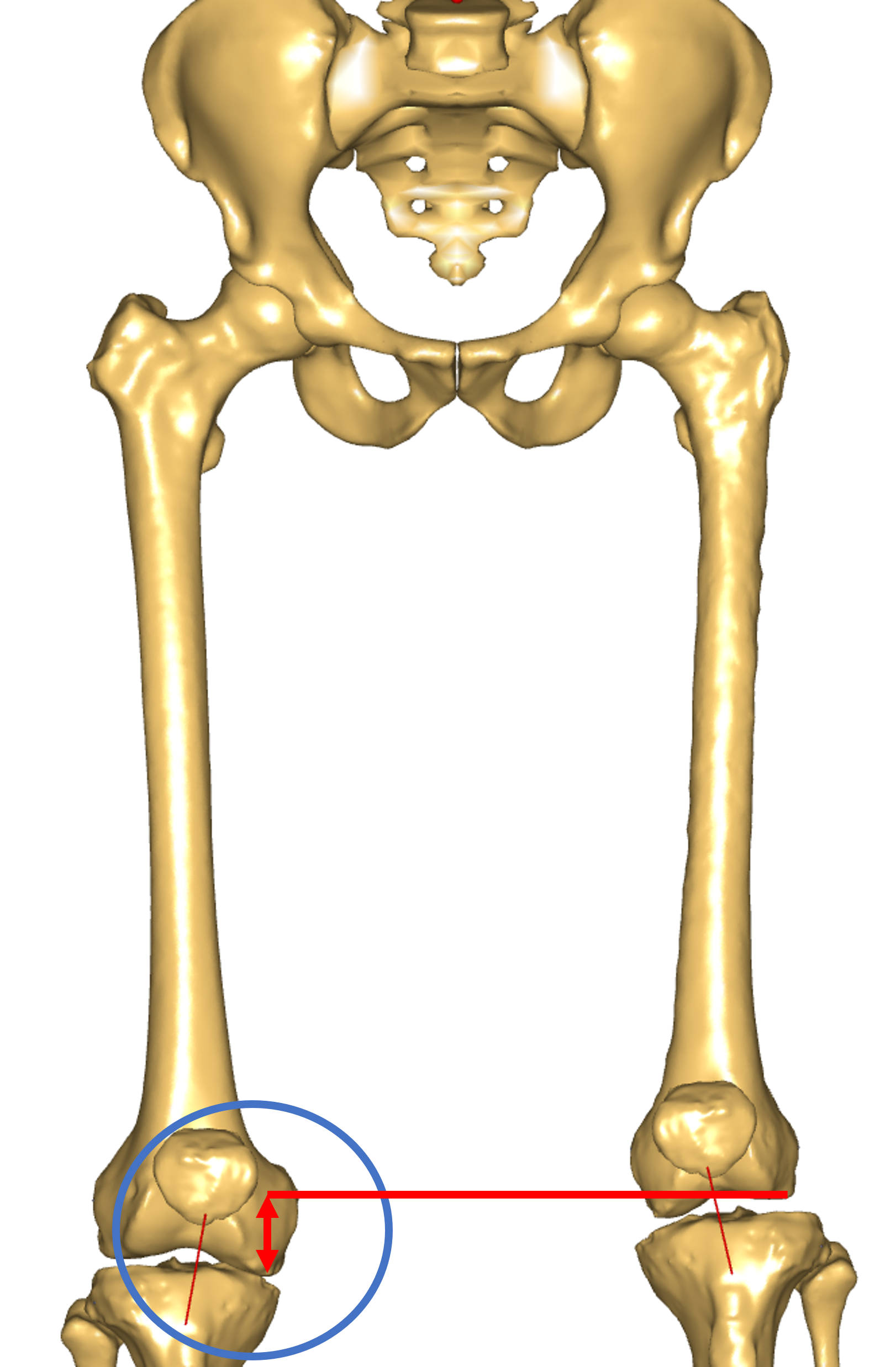
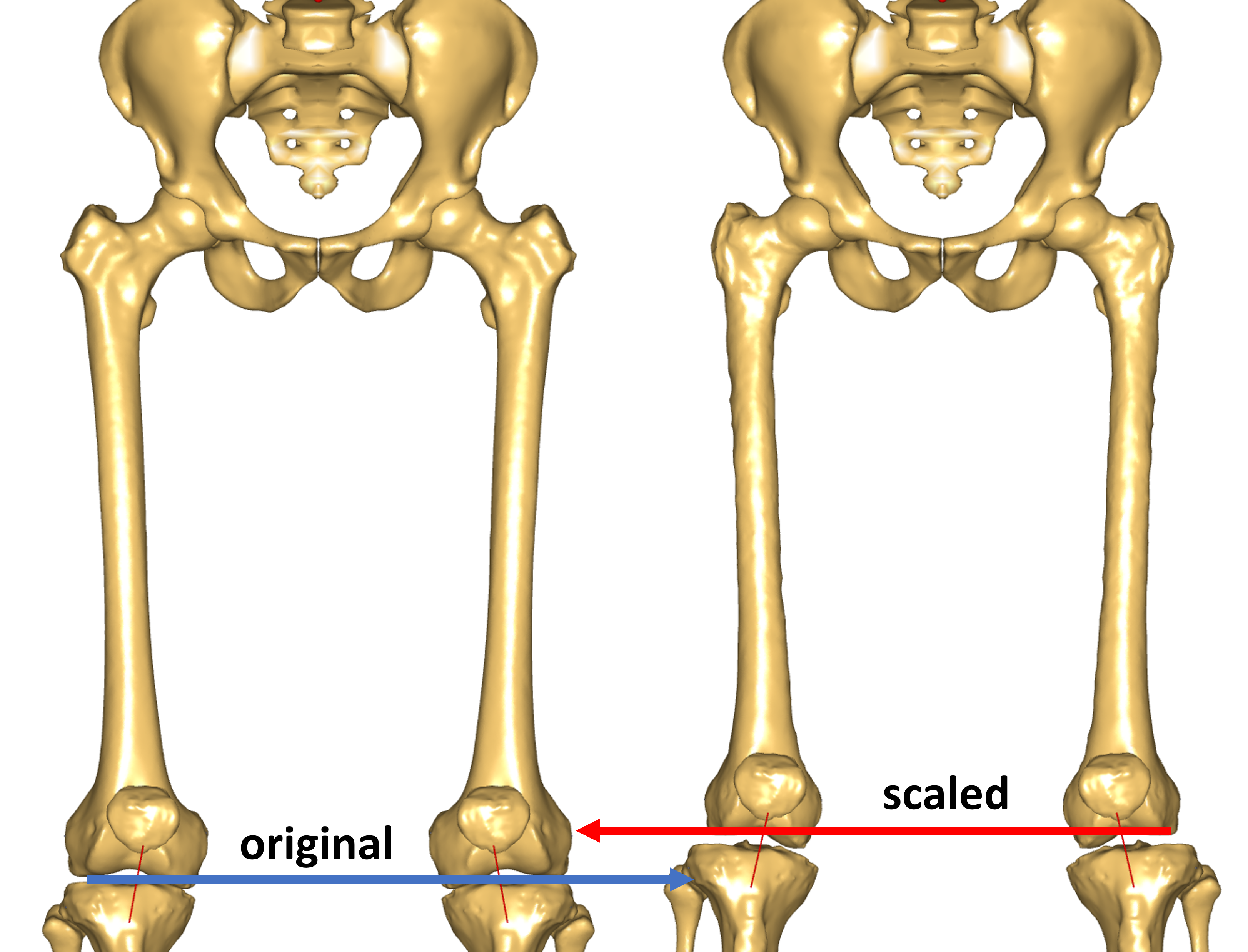
Most of the described scaling schemes are based on anthropometric measurements and linear scaling transforms. As such they do not reconstruct needed bone morphology to a very high level of detail, i.e. local deformities of certain bone features may not be covered by such scaling. However, there is still a wide range of applications for them. But in this lesson we will focus on the nonlinear transformation.
The morphing function described in this lesson transforms (not necessary in a linear manner) a set of given points (source landmarks) into a set of known subject-specific points (target landmarks). For this purpose the following approximation is constructed:
where \(c_{j}\) are the coefficients of the RBF functions \(\phi\), computed based on the source and target landmarks, \(p\) is the polynomial of order \(q\), and \(\phi\) is the RBF function, which can take different forms. Here, we are just looking at one of the following forms:
\(\phi\left( r \right) = e^{- \text{ar}^{2}},\ a > 0\), – Gaussian function, or
\(\phi(r) = r^{2} \bullet ln(r)\) – thin plate spline, or
\(\phi\left( r \right) = \sqrt{r^{2} - a},\ \ a < r^{2}\), – multiquadratic function.
Other forms can be found in the reference manual.
To define such a transform in AnyScript we can use a template provided by the AnyBody Modeling System:
AnyFunTransform3DRBF <ObjectName> = {
//PreTransforms = {};
/*RBFDef = {
Type = RBF_Gaussian;
Param = 1;
};*/
Points0 = ;
//RBFCoefs = {};
//PolynomDegree = -1;
//PolynomCoefs = {};
//PointNames = ;
//PointDescriptions = ;
//Points1 = ;
/*BoundingBox = {
Type = BB_Cartesian;
ScaleXYZ = {2, 2, 2};
DivisionFactorXYZ = {1, 1, 1};
};*/
//BoundingBoxOnOff = Off;
};
The PreTransforms member allows inclusion of other transforms to be a
part of the transform that is being constructed. The pre-transforms will
be applied on both, source landmarks, Points0, and on the object that
will be processed using this transform.
The Points0 variable is a \(k\times 3\) matrix of the source
landmark coordinates, where k is the number of source points. Points1 is
the matrix of target landmarks of the same size. These two entities
alone define a 3D RBF transform.
The PolynomDegree variable corresponds to the \(q\) degree of the
polynomial term of the aforementioned approximation. Recommended degree
is 1, i.e. a linear component. This kind of approximation gives good
results in our empirical observations.
RBFDef.Type defines a type of the RBF function. Possible options are
RBF_Gaussian (default), RBF_ThinPlate, RBF_Biharmonic,
RBF_Triharmonic, RBF_MultiQuadratic, and RBF_InverseMultiQuadratic as
can be found in the reference manual. This type of specification is an
important parameter as it defines the interpolation/extrapolation
behavior of the RBF transform. Further, we will demonstrate the
difference of using different radial basis functions.
RBFDef.Param corresponds to the parameter \(a\) mentioned in the
definitions of the Gaussian and the multiquadratic RBF function. By
varying this parameter it is possible to change the behavior of a chosen
RBF function, e.g. prescribe a local effect of the landmarks.
PointNames is a string array to give text identifiers for the landmarks.
This can be used to be output to landmarks to process in external
packages. Similarly, PointDescriptions is an additional storage for more
detailed information on how to locate the landmarks.
An alternative way to define an RBF transform is to specify the required
approximation coefficients explicitly. This can be done by defining the
RBFCoefs and PolynomCoefs variables. However, this is a very demanding
and non-intuitive procedure and the preferable way is to define the
corresponding sets of landmarks.
As it is clear from the description the following block describes a
bounding box. This bounding box is computed on provided source landmarks
and used to construct additional landmarks for the construction
algorithm. It will internally increase the size of Points0 and Points1
members to \((k + n) \times 3\). This is done to improve the
extrapolation behavior of the AnyFunTransform3DRBF object. Please note
that it will use the same bounding box points for both, source and
target set, and, therefore, using BoundingBoxOnOff requires the landmark sets
to be registered prior to using this feature. The latter can be done by using
AnyFunTransform3DLin2 or others.
There are two ways to compute an auxiliary bounding box – the first way
is to compute it in the Cartesian coordinate system, the other way is to
look at the principal axes. This can be changed by modifying the
BoundingBox.Type parameter to be either BB_Cartesian or
BB_PrincipalAxes.
The parameter BoundingBox.ScaleXYZ defines a vector of scaling factors
that will be applied to the bounding box dimensions, which will expand
or shrink the field of the extrapolation improvements.
The next parameter is BoundingBox.DivisionFactorXYZ. This parameter
specifies how many additional auxiliary points we require for the
transform construction along different axes. For example, we can request
to divide the Y axis by three points instead of two by setting this
vector to {1,2,1}.
Finally, the BoundingBoxOnOff flag is a switch for the inclusion or
exclusion of the auxiliary landmarks for the construction of the
transform.
Nonlinear Surface Based Scaling Transformation#
The previous section describes an interpolation and extrapolation
transform that works on discrete points in space. However, often the
selection of these landmarks is unintuitive and we may require an
automated tool to assist us in this task. A surface-based RBF class,
AnyFunTransform3DSTL, was developed for this purpose:
AnyFunTransform3DSTL <ObjectName> =
{
//PreTransforms = ;
/*RBFDef =
{
Type = RBF_Gaussian;
Param = 1;
};*/
//FileName0 = ;
//ScaleXYZ0 = {1, 1, 1};
//SurfaceObjects0 = ;
//FileName1 = ;
//ScaleXYZ1 = {1, 1, 1};
//SurfaceObjects1 = ;
NumPoints = 0;
//UseClosestPointMatchingOnOff = On;
//PolynomDegree = -1;
//PolynomCoefs = ;
/*BoundingBox =
{
Type = BB_Cartesian;
ScaleXYZ = {2, 2, 2};
DivisionFactorXYZ = {1, 1, 1};
};*/
//BoundingBoxOnOff = Off;
};
Similarly to the AnyFunTransform3DRBF, the pre-transforms will be
included into the transformation that is being constructed. As well as
that auxiliary bounding box points will be added to the transform
exactly like in AnyFunTransform3DRBF.
FileName0 and FileName1 specify surface files that will be used for the
construction of the transform. The underlying method is exactly the same
as in the AnyFunTransform3DRBF, except that source and landmarks now
will be found automatically.
ScaleXYZ0 and ScaleXYZ1 members are scaling vectors that can be used to
scale or mirror the surfaces. For example, unit change from millimeters
to meters can be done by multiplying the components of the vectors with
0.001.
However, it is best to use SurfaceObjects0 and SurfaceObjects1 to define
the input, since these objects can also be pretransformed using various
linear and nonlinear transformations, i.e. registration from the
coordinate system of the CT scanner to the anatomical frame.
SurfaceObjects0 and SurfaceObjects1 expect references to the AnySurfSTL
objects, that already contain ScaleXYZ, and, thus, will not use
ScaleXYZ0/ScaleXYZ1.
The NumPoints parameter specifies how many landmarks will be used to construct a
transformation. This number of source landmarks is seeded on the vertices of the
source STL surface. To find matching pairs the closest points are found
on the target surface. Please note that it is assumed that the
geometries are well aligned using AnyFunTransform3DLin2 or
AnyFunTransform3DRBF, and therefore, the error of the closest point
algorithm is negligible.
RBF Point-Based Scaling Example#
This section introduces an example of using AnyFunTransform3DRBF
function. We have prepared a model, where the transform is already
constructed using some pre-defined settings. The intention of this example
is to see how different parameters affect the scaling law. Thus, we will
adjust the parameters and observe how that changes the results.
Let us start by downloading the model:
AppendixA.zip
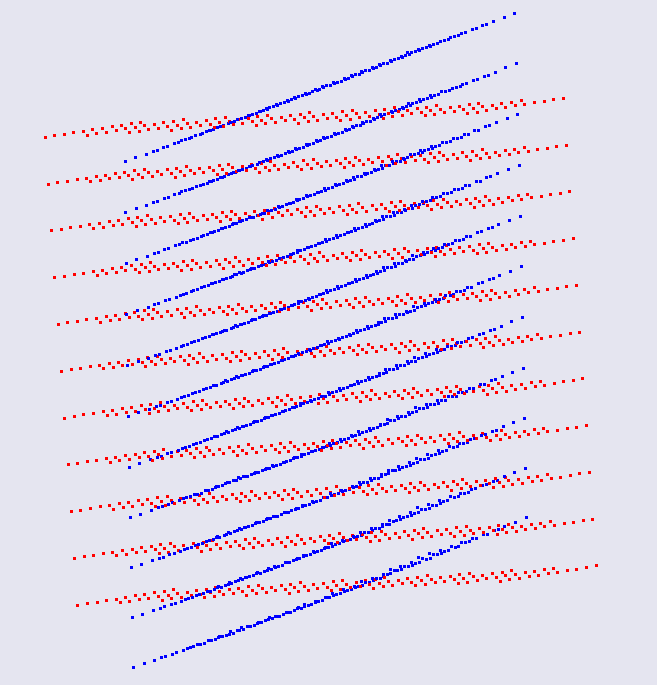
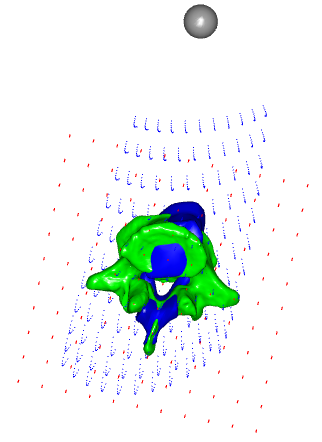
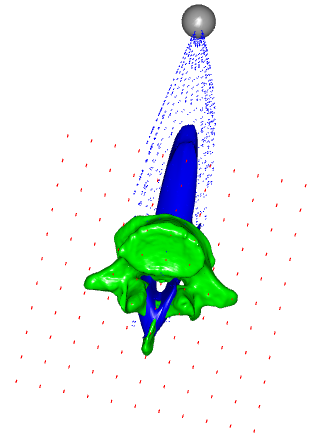
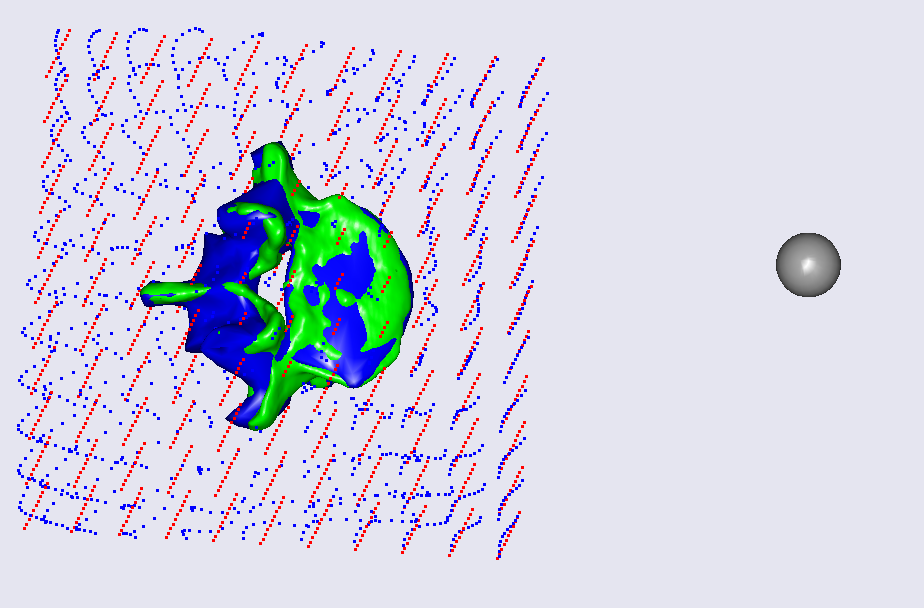
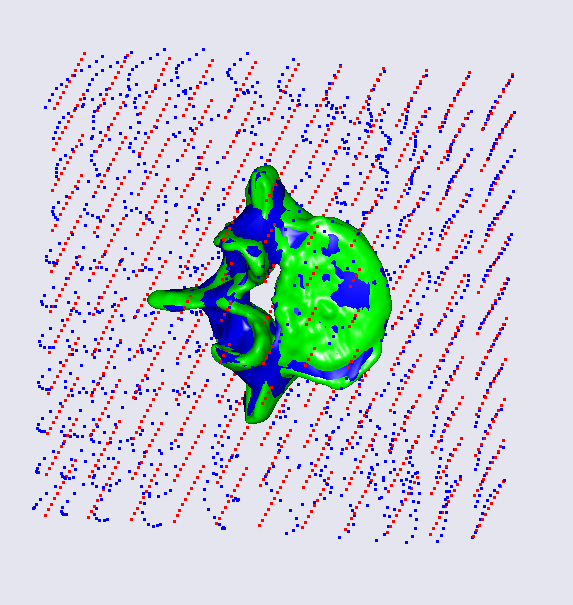
The downloaded model consists of a two-component transformation pipeline (the first step is a point-based affine, the second one is an RBF transform), a set of points aligned in a grid, and the source and target surfaces that will be used to check the result of the morphing. The origin of the coordinate system is also drawn as a grey sphere used as a visual reference. If we load the model and look at the Model View, you can observe two surfaces and two point clouds – a red point cloud corresponding to the point cloud prior to the RBF transform, and a blue point cloud corresponding to the result of application of the RBF transform:
Now we take a look at the content of the file grid.any. This file
contains a matrix of grid coordinates that is used to exemplify how
the morphing works and show the deformations. It is possible to
switch on and off grid planes. This can be done by setting the corresponding
flags to 0 or 1. For example, if the GridAll flag is set to 1, all grid planes
will be visualized. The other way around, if GridAll is 0 and only GridX5
is set to 1, then just the fifth grid plane will be visualized. This
functionality was added to enable more flexible visualization to better
understand the behaviour of the transform in this tutorial. Thus, we
will switch on and off some layers during this lesson to explain some
effects. Please note that if GridX11 is switched off then it is required
to remove the comma at the end of the AnyScript block, which contains
the last plane of the grid.
Let us proceed to the explanation of the first block of parameters in the main
script. At first, we change the RBFDef.Param and see how this internal parameter
of radial basis function affects the behavior of the scaling law. Let us try to
set it to 0.2, 2, 20, and 200.
AnyFunTransform3DRBF RBFTransform =
{
PreTransforms = {&.AffineTransform};
RBFDef = {
Type = RBF_Gaussian;
Param = 2;
};
// ....
0.2 |
2 |
|---|---|
20 |
200 |
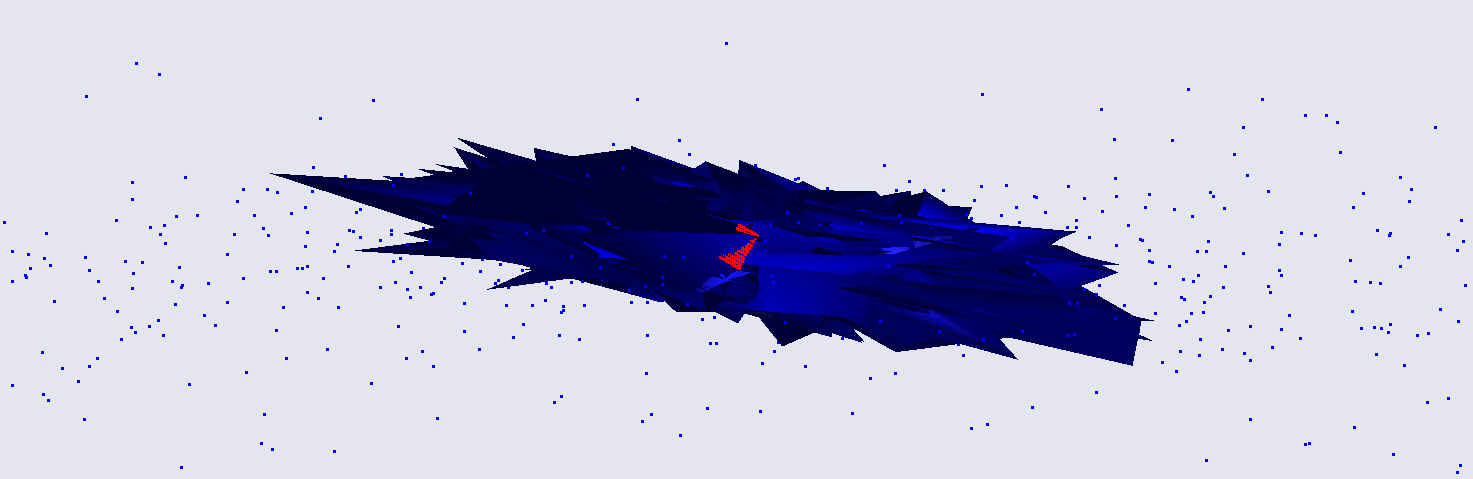
We can see strange behaviour of the deformation field that is hard to explain, however, you can notice that the deformed grid is approaching the origin of the coordinate system, when the parameter increases. Let us look back at the definition of the Gaussian radial basis function: \(\phi\left( r \right) = e^{- \text{ar}^{2}}\). We can see that the exponential nature will decrease the influence of the r component. However, if the parameter is too large the influence of radial distances will be minor and insignificant. Thus, it is necessary to keep the balance between this parameter and expected size of the object being scaled.
You can also notice that the suggested morphing is not that good;
however, just 4 landmarks were used to construct this transform. Now we
know the recommendations on RBFDef.Param require it to be rather small.
Let us fix this parameter to 0.2 and try to increase the number of
landmarks by uncommenting all the landmarks provided in the example for
both source and target sets – will it increase the accuracy?
AnyFunTransform3DRBF RBFTransform =
{
PreTransforms = {&.AffineTransform};
RBFDef = {
Type = RBF_Gaussian;
Param = 0.2;
};
// ....
AnyMatrix SourceLandmarks = {
{0.0709736, 0.0184485, -0.000127864},
{0.0648285, 0.0049608, 0.000451266},
{0.0621017, -0.00819697, 0.00140694},
{0.0553114, 0.0230441, -0.000445997},
{0.0393397, 0.0248069, -0.000680061},
{0.0377703, 0.0133058, -0.00105235},
{0.0360412, 0.00201606, -0.000391467},
{0.0472074, -0.00352919, -0.000413361},
{0.0550465, 0.0208449, -0.0224952},
{0.0520597, 0.00993834, -0.0203476},
{0.0489349, -0.0013904, -0.0225025},
{0.0546416, 0.0207262, 0.0225993},
{0.0528326, 0.0103044, 0.0202943},
{0.0499033, -0.00157613, 0.0225706},
{0.0359901, 0.0268197, -0.014787},
{0.034303, 0.0187035, -0.0094985},
{0.0172761, 0.0312099, -0.0202515},
{0.0305037, 0.0326659, -0.0163874},
{0.0367762, 0.026968, 0.0138197},
{0.0352582, 0.0191998, 0.00955337},
{0.0166408, 0.0316569, 0.018449},
{0.0302597, 0.0327436, 0.0168596},
{0.0257677, 0.0215728, -0.0350927},
{0.0306725, 0.0206658, -0.0314054},
{0.0287405, 0.0202933, -0.029373},
{0.0261867, 0.0213401, 0.0353598},
{0.0305148, 0.0210284, 0.0312686},
{0.028598, 0.0211475, 0.0296013},
{0.0187725, -0.00176881, -0.013463},
{0.0184676, -0.00178103, 0.0131414},
{0.00214891, 0.015245, -0.000660534},
{-0.001729, 0.0102335, -0.000314431},
{0.00463535, 0.0115322, -0.00400253},
{0.0038934, 0.0115578, 0.0037766},
{0.0195611, 0.0216146, -6.12942e-005},
{0.0142823, 0.00469346, -0.000166401}
};
AnyMatrix TargetLandmarks = 0.001*{
{-11.6256, -134.079, 34.0564},
{-11.4732, -141.378, 42.8396},
{-11.8893, -147.6, 55.5568},
{-10.9339, -149.757, 22.2911},
{-10.0394, -169.576, 15.2177},
{-10.0568, -167.821, 26.3967},
{-11.3658, -172.414, 35.9614},
{-11.1052, -161.143, 44.4721},
{16.8688, -150.921, 26.3913},
{11.4513, -156.085, 35.6888},
{11.6961, -163.765, 48.3554},
{-40.0495, -148.356, 22.7364},
{-32.158, -154.956, 33.4061},
{-37.8105, -163.072, 42.9189},
{10.2577, -166.946, 16.7679},
{4.25147, -170.334, 24.5256},
{11.4583, -186.266, 4.15902},
{9.00427, -170.432, 2.29037},
{-29.5786, -166.347, 13.1397},
{-24.1207, -168.331, 22.0858},
{-27.4179, -185.915, 3.44909},
{-29.2773, -172.733, 0.305996},
{34.5511, -177.928, 19.9739},
{26.6359, -171.323, 23.5182},
{22.3573, -180.006, 17.6042},
{-54.5362, -177.697, 16.5518},
{-44.3674, -167.961, 21.4712},
{-42.6288, -177.637, 14.5326},
{4.9324, -191.139, 37.1707},
{-27.1454, -195.058, 36.7413},
{-14.8139, -202.147, 5.60439},
{-15.0298, -213.168, 8.54038},
{-10.9629, -201.601, 13.6267},
{-16.7362, -203.051, 12.2525},
{-10.9261, -181.616, 7.78731},
{-12.5005, -196.124, 24.7113}
};
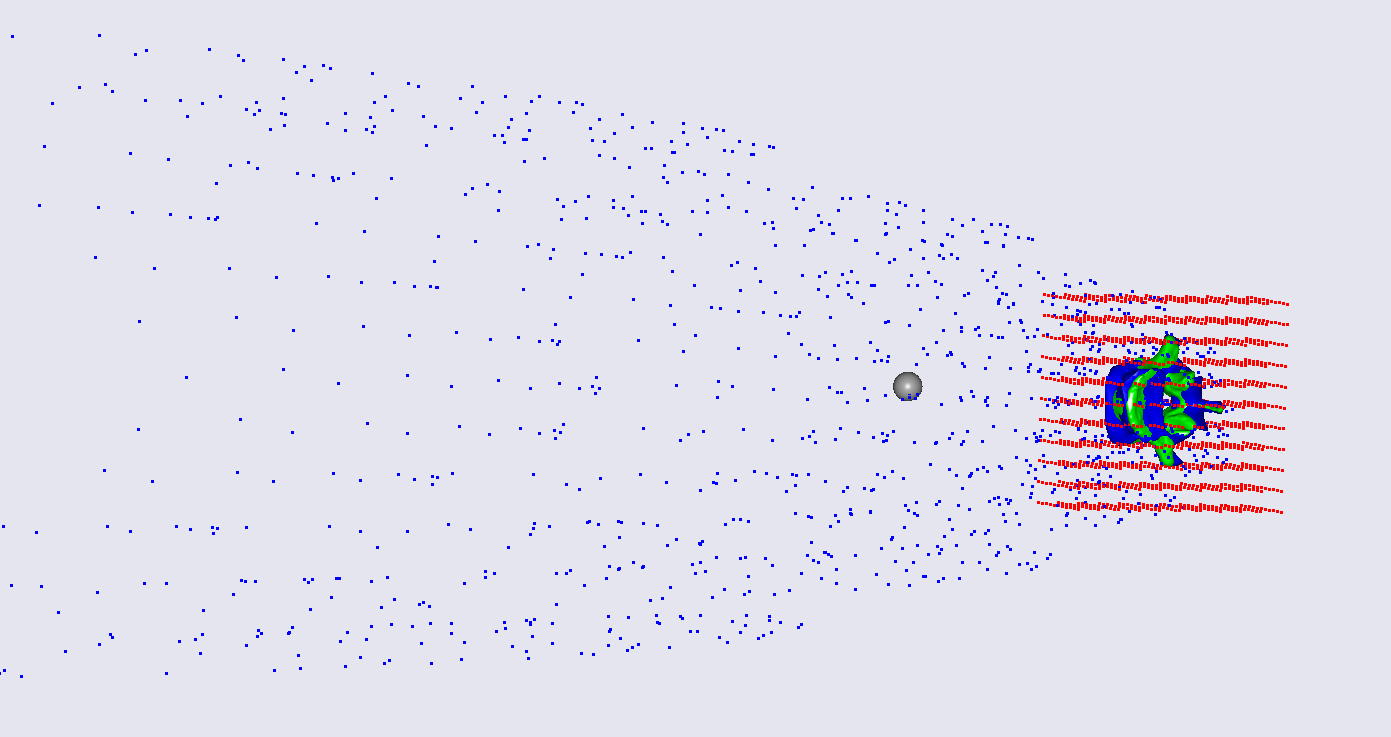
Now we see that the scaling does not work at all. The problem here is
that the Gaussian type of the RBF transform is sensitive to the number
of landmarks, and does not work well with a too large number of them.
The solution here is to switch RBFDef.Type to RBF_ThinPlate:
AnyFunTransform3DRBF RBFTransform = {
PreTransforms = {};
RBFDef = {
Type = RBF_ThinPlate;
Param = 0.2;
};
...
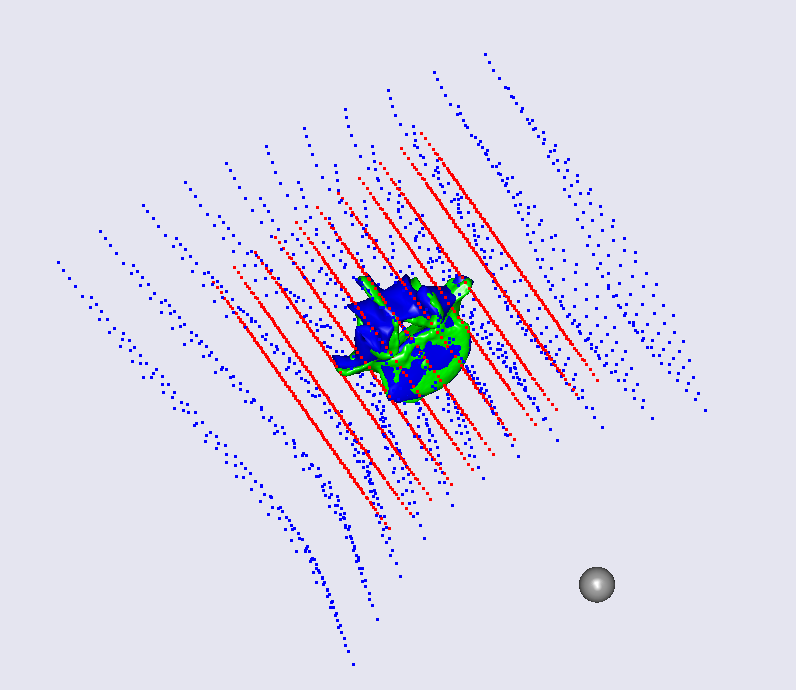
This modification fixes the problem for the bony surfaces and their
vicinities – now they look alike. Thus, it is recommended to use
RBF_Gaussian type only with low number of landmarks. RBF_ThinPlate is
recommended for larger numbers. However, you may also choose between
RBF_ThinPlate and RBF_Gaussian based on their performance.
Now we can morph the bone surface itself and some points that are close to the surface. But what about the extrapolation problem, which is supposed to handle all muscle/ligament attachments and other points? It is clear that in such form this solution is not viable, and even dangerous as the last picture shows. There are two not necessarily exclusive approaches to handle this problem.
The first solution is to look back at the equation of approximation and
notice that at this point we are still not utilizing the polynomial
term. Let us try to switch it on and set the PolynomDegree to 1,
which is recommended by the reference manual. Now our approximation
looks smoother and probably more reasonable:
However, one may still think that the extrapolated points are lying too far out. There is one more modification that may affect this solution. We can define the behavior of the extrapolation by suggesting the boundaries of the transform. The bounding box member enables us to take its points as both source and target landmarks making a candidate point for extrapolation to be transformed into itself. Let us try to switch on the bounding box corners and face points to be included as landmarks:
AnyFunTransform3DRBF RBFTransform =
{
PreTransforms = {&.AffineTransform};
RBFDef = {
Type = RBF_ThinPlate;
Param = 0.2;
};
Points0 = .SourceLandmarks;
PolynomDegree = 1;
Points1 = .TargetLandmarks;
BoundingBox =
{
Type = BB_Cartesian;
ScaleXYZ = {2, 2, 2};
DivisionFactorXYZ = 2*{1, 1, 1};
};
BoundingBoxOnOff = On;
};
You can notice that the face and corner points on the bounding box, which was increased by a factor of 2, also improved extrapolation and suggested that the extrapolated points will now lie within similar distance from the original surface.
This model allows changing other parameters of the bounding box as well:
one can modify the size of the bounding box to capture more points and
expand the extrapolation field; you can also seed more points on the
faces and corners by defining DivisionFactorXYZ to strengthen
extrapolation at the boundaries.
This section gave an overview of how to use the AnyFunTransform3DRBF
class. So now this model can be used for further investigation of the
RBF behaviour.
RBF Surface-Based Scaling Example#
For the second part of the lesson we will describe and explain how to
work with the AnyFunTransform3DSTL class. This class was implemented to
simplify subject-specific modeling by including source and target
surfaces into an RBF transform, where all source and target landmarks
will be found automatically or semi-automatically.
This transform and underlying equations are exactly the same as in the
AnyFunTransform3DRBF class. The only things that you can control are how
to seed the landmarks on the provided surfaces, i.e. how dense they
should be, and allow topologically equivalent surfaces to be morphed
using vertex-vertex correspondence. Thus, this part of the lesson will
not cover the RBF part, but it will only cover the landmark-related
part. For simplicity, exactly the same RBF parameters will be used as in
the paragraph before.
Let us try to play with settings of this transform. We will use the
model from the first part of this lesson with all modifications and an
additional AnyFunTransform3DSTL object. Please download this model,
AppendixB.Main.any, into the same
folder – that will make sure that all common files are in place.
Let us start by modifying the number of landmarks. Such modification plays two slightly different roles in the construction of the non-linear RBF transform. First of all, it allows controlling the density of points and, therefore, the accuracy of the constructed transform. For example, if we request NumPoints to be 4, we will face the same situation that we experience in the first lesson. Thus, increasing this number should hypothetically improve the morphing. However, nothing comes for free – the sizes of allocated matrices will also increase, and the speed of the model construction will decrease to some degree. Additionally, by increasing the number of points we increase the probability of covering all small and sharp features of the bone by landmarks. Please note that the surface vertices are selected as landmarks by uniformly distributing them across all vertex indices. That may cause the situation when a bony feature consists of a small number of vertices and, therefore, may appear to be not included in the landmark set. Changing the number of requested landmarks may fix this problem. Thus, it is a general recommendation to change the number of landmarks until the desired or an acceptable accuracy is reached. Let us change the number of points to the values of 20, 200, 400, and 1000:
AnyFunTransform3DSTL STLTransform =
{
PreTransforms = {&.RBFTransform};
RBFDef = {
Type = RBF_ThinPlate;
Param = 1;
};
AnyFixedRefFrame Input = {
AnySurfSTL Src = {
FileName = "L5Src.stl";
ScaleXYZ = {1, 1, 1};
};
AnySurfSTL Trg = {
FileName = "L5Trg";
ScaleXYZ = {1, 1, 1}*0.001;
};
};
SurfaceObjects0 = {&Input.Src};
SurfaceObjects1 = {&Input.Trg };
NumPoints = 20;
//UseClosestPointMatchingOnOff = On;
PolynomDegree = 1;
BoundingBox = {
Type = BB_Cartesian;
ScaleXYZ = {2, 2, 2};
DivisionFactorXYZ = 2*{1, 1, 1};
};
BoundingBoxOnOff = On;
};
20 |
200 |
|---|---|
400 |
1000 |
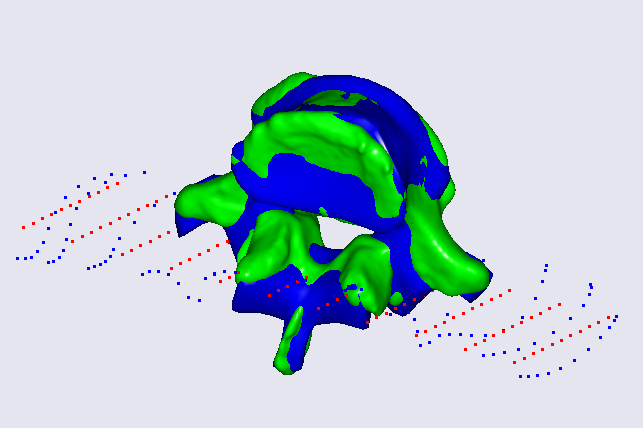
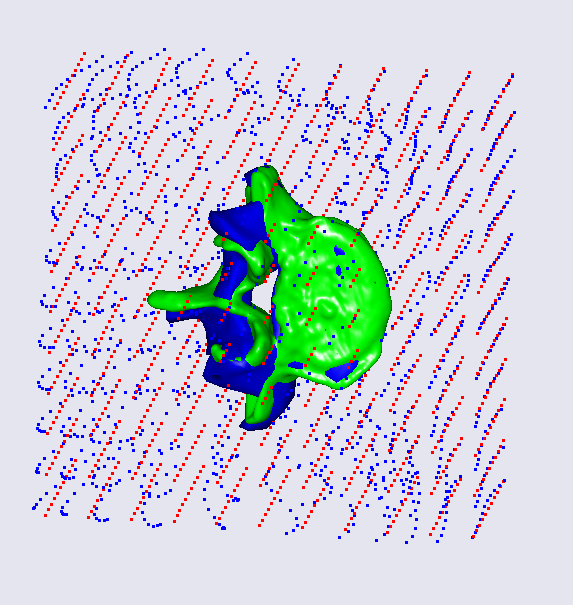
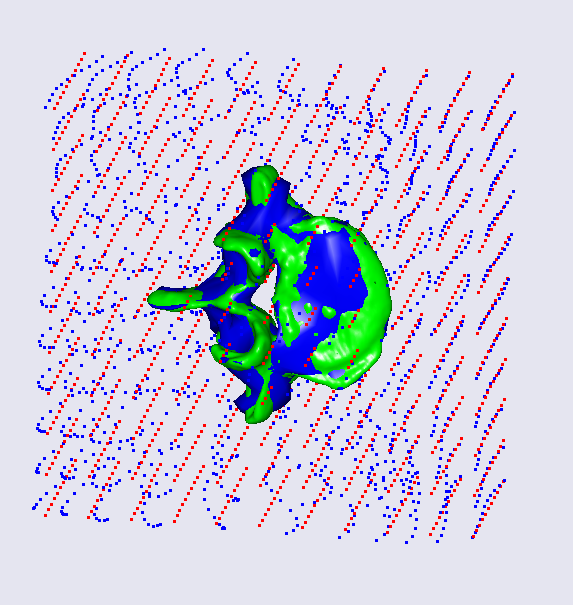
These images highlight how the increase in the landmark number affects the accuracy of the transform. With just 20 landmarks most of the bony processes are not being captured. Increasing to 200 landmarks leads to rather coarse, but better, morphing. This, of course, may be sufficient for some applications. Further increase changes the surface even more. Please note that the outer grid is not affected much by the change of this number. Therefore, this increase will only affect muscle and ligament attachment nodes that are on or close to the surface.
A last possible modification is to utilize topologically equivalent
surfaces to construct the scaling law. That only requires setting the
UseClosestPointMatchingOnOff flag to be Off and supplying surfaces,
which have corresponding vertices and connectivity matrices.